|
|||||||||||||
|
|
|||||||||||||
|
Feature Articles: Approaching and Exceeding Human Abilities with Artificial Intelligence and Brain Science Vol. 18, No. 11, pp. 21–26, Nov. 2020. https://doi.org/10.53829/ntr202011fa3 Brain-information Processing for Quick and Stable Human Movements―Stretch-reflex Regulation Based on Visually Updated Body RepresentationAbstractFrom the extraordinary performances of athletes to our most common everyday actions, human body movements are heavily governed by unconscious and automatic information processing of sensory-motor flow, some of which is known as a reflex. Our resent research has demonstrated that the brain flexibly regulates stretch reflexes, using body information shaped by integrating multiple sensory cues, including vision. This finding suggests that there is sophisticated brain processing underlying reflex control, in contrast to the classical view of reflexes as simple and primitive. Keywords: stretch reflex, motor control, multisensory integration  1. IntroductionWhen we move our bodies, various sensory-motor processes are unconsciously executed in our brain. Reflex is one of these mechanisms, which evokes actions without conscious thought in response to stimuli such as visual or proprioceptive* inputs. Since a reflex can evoke quicker action than voluntary movements (movements performed via conscious thought), it enables an instantaneous reaction in response to an opponents’ movement, for example, during competitive sports. Moreover, a wide range of actions in our everyday life cannot be performed without the support of unconscious motor control mediated by the reflex system. NTT Communication Science Laboratories has investigated how the reflex system is regulated in our brain and contributes to our action execution [1–3]. This article briefly explains the function of the stretch reflex (a reflex driven by proprioceptive inputs) then reviews our recent study [4] regarding information processing for generating the stretch reflex.
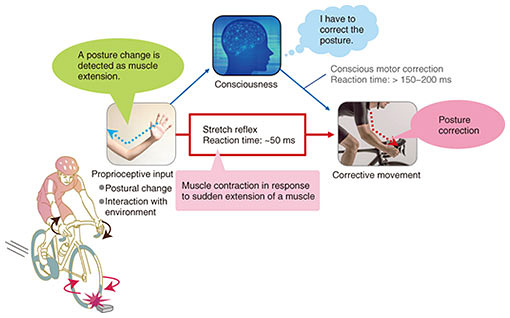
2. Mechanisms and functions of the stretch reflexThe stretch reflex is involuntary muscle contraction induced by a sudden passive muscle extension. This sensory-motor mechanism plays an important role in maintaining posture stability (Fig. 1). For instance, a sudden change in arm posture can be caused by unexpected contact with an external object. Muscle spindles, receptors that sense changes in muscle length, detect the sudden stretch of the muscle occurring with the postural change and send that signal to the central nervous system. This signal then causes contraction of the stretched muscles after it is instantaneously processed by specific brain areas. There are two responses of the stretch reflex: (1) short-latency stretch reflex generated in a spinal circuit and (2) long-latency stretch reflex generated through broader neural circuits including a sensory-motor area in the cerebral cortex [2]. Importantly, even the long-latency stretch reflex generates muscle contraction in quite a short time of 50 ms from the stimulus onset, which is shorter than the response latency of voluntary reactions (100–150 ms). Accordingly, stretch reflexes enable us to react and compensate for postural changes more quickly than the fastest voluntary movements.
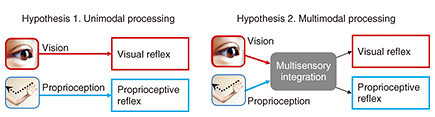
Previous research has shown that stretch reflex responses are not constant but can be modulated in response to changes in the tasks or environment [3, 5]. Thanks to modulation of the reflex system, the brain can flexibly adapt motor control to various contexts. However, the details of the information processing underlying this functional reflex modulation remains unclear. For instance, it is unknown whether adjustments of the stretch reflex depend on only proprioceptive information or body states obtained by combining multiple sensory information, including vision. To examine this point, we investigated if visual information affects stretch reflexes by manipulating visual cues through a series of experiments. 3. Contributions of multisensory integration to reflex controlThere are two possible hypotheses accounting for the information process underlying the regulation of the stretch reflex (Fig. 2). The first hypothesis is that the regulation of the reflex simply depends on unimodal information. Since the stretch reflex is triggered by proprioceptive inputs, this hypothesis proposes that proprioception alone is the source for stretch-reflex regulation. The second hypothesis, on the other hand, proposes that stretch-reflex modulation depends on the body information provided by multiple sensory sources, including vision. This assumes that the brain uses multisensory integration to obtain reliable estimates of the current body state, even for reflex control. To dissociate these two possibilities, we recently conducted experiments in which we manipulated a visual cue representing body posture and tested if this visual manipulation affected the stretch reflex [4].
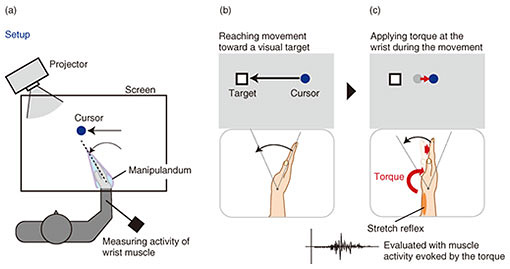
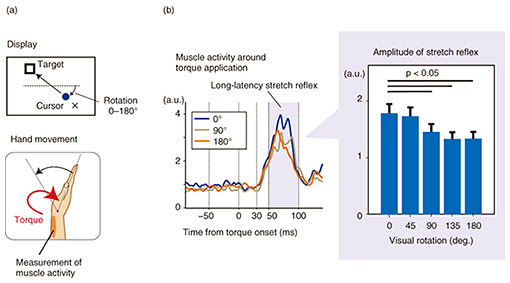
Using the setup shown in Fig. 3(a), we asked participants to perform reaching movements toward a visual target by flexing the wrist (Fig. 3(b)). In some trials, a manipulandum (a robotic device for measuring hand movements) applied an instantaneous mechanical torque to extend the wrist (Fig. 3(c)). This sudden and rapid wrist extension evokes stretch-reflex response in the wrist extensor muscle. We evaluated the size of the stretch-reflex response by measuring muscle activities with electrodes attached to the skin. As an experimental manipulation, we introduced a mismatch between visual information and actual body motion by giving rotation in the direction of cursor movements (Fig. 4(a)). Notably, the displayed location of the target and the starting point were also rotated so that actual hand movements were identical regardless of the visual rotation. We compared the amplitude of the stretch-reflex response under different visual rotation angles to investigate the effect of visual information on stretch-reflex regulation. As shown in Fig. 4(b), we found a decrease in the amplitude of the long-latency stretch reflex as the visual rotation angle increased, which clearly demonstrates the impact of visual manipulation on the stretch-reflex response. This result supports the hypothesis that multiple sensory information, including vision, contributes to stretch-reflex regulation. Accordingly, even for reflex control, our brain seems to use reliable body-state estimates obtained by multisensory integration, as it does for voluntary motor control.
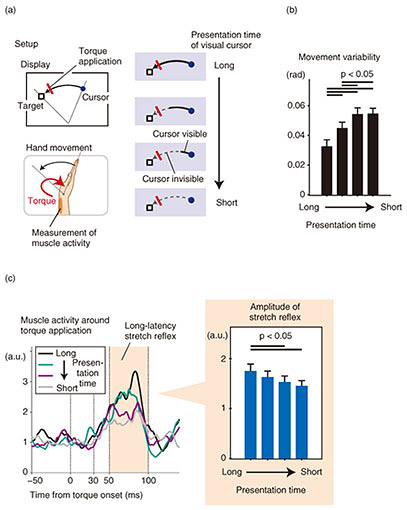
4. Effect of uncertainty in estimating body states on stretch-reflex controlThe first experiment showed that rotation of visual feedback reduces the amplitude of the stretch-reflex response. One possible reason of this modulation is that uncertainty in estimating body states, due to visual rotation, led to the attenuation of responses. To examine this hypothesis, we eliminated the visual cursor representing hand position during wrist movements (Fig. 5(a)) in the second experiment. By varying locations to eliminate the cursor, we controlled the presentation time of the cursor at four levels to add uncertainty in visual information. We found that movement endpoints became more variable as the presentation time decreased (Fig. 5(b)). This increase in movement variability indicates that the elimination of the cursor increased uncertainty in body-state estimates during the hand movement. We also found a decrease in amplitude of the long-latency stretch reflex as the presentation time of the cursor shortened (Fig. 5(c)). This result suggests that the stretch reflex is down-regulated depending on the uncertainty of the body state during movements. An interpretation of this result is that the brain reduces the risk of generating a large response in an incorrect direction, due to erroneous body-state estimation, by attenuating reflex response when the sensory information is not reliable.
5. Summary and future directionOur recent study [4] revealed that visual information relating to the body state contributes to the regulation of the stretch reflex. Our experiments showed a decrease in amplitude of the stretch-reflex response under the conditions of (1) a mismatch between visual feedback and actual movement and (2) elimination of visual feedback. These results indicate that the brain uses body representation containing visual information to regulate the stretch reflex. By changing the presentation time of the visual cursor, we also found a negative relationship between the size of the reflex response and variability of movement endpoints. This is interpreted as occurring because the stretch reflex is regulated depending on the uncertainty of body-state estimates during movement. These findings suggest that more complex brain computation underlie stretch-reflex regulation than has conventionally been thought. In the future, we aim to further elucidate the information processing in the brain that regulates the reflex system. Particularly, our interests are to reveal the neural basis of reflex modulation and build a theoretical framework to account for the functional regulation of reflexes. We expect that the motor-control-related insights obtained through this reflex study will also be beneficial to a range of applications involving human movements such as analyzing the performance of athletes or developing effective methods for physical training. In addition, our study demonstrated the essential role of multisensory integration in movement execution. Understanding how the brain uses multiple forms of sensory information in action is important to designing human-machine interfaces accompanying body movements. We will accumulate further knowledge on sensory-motor processing for practical application, including the development of virtual-reality systems. AcknowledgmentsThis work was supported by Grants-in-Aid for Scientific Research (JP16H06566) from Japan Society for the Promotion of Science. References
|
|||||||||||||