|
|||||||||||||||||||||
|
|
|||||||||||||||||||||
|
Feature Articles: Non-terrestrial Networks for Extreme Coverage Extension Vol. 21, No. 8, pp. 16–22, Aug. 2023. https://doi.org/10.53829/ntr202308fa1 Underwater Acoustic Communication Technology for Wireless Remotely Operated VehiclesAbstractToward the 6th-generation mobile communication system, extreme coverage extension is expected to provide wireless communication services in the sky, at sea, and in space, which are regions not serviced by mobile communication systems. To achieve extreme coverage extension to the sea, NTT Network Innovation Laboratories is investigating higher-speed, longer-distance, and more stable underwater acoustic communications. In this article, we introduce our underwater acoustic communication technology and the feasibility demonstration of the world’s first fully wireless remotely operated vehicle applying this technology. Keywords: extreme coverage extension, underwater acoustic communication, remotely operated vehicle (ROV)  1. Demand for underwater wireless communications to achieve extreme coverage extensionResearch and development (R&D) of the 6th-generation mobile communication system (6G) is in progress toward its implementation in the 2030s. 6G is expected to provide communication services for everywhere including the sky, at sea, and in space, which are regions not serviced by mobile communication systems, as well as enhance terrestrial wireless communication systems [1]. We call this concept of expanding communication coverage extreme coverage extension. The undersea region has been a region where wireless communications have not been widely used, although the utilization of wireless communications has been desired for enhancing operational efficiency in industrial sectors such as subsea resource development and port construction. Radio waves are widely used in terrestrial wireless communication systems, however, they cannot be used similarly underwater because of high attenuation. Low-frequency electromagnetic communications have been put to practical use, but their transmission distance and speed are extremely limited. Therefore, using sound waves or visible light is effective for underwater wireless communications. Acoustic communications that use sound waves can use a higher frequency range and achieve longer transmission distance compared with electromagnetic communications. However, the frequency range is still much narrower than that of terrestrial wireless communication systems. The data rate of practical acoustic communications is less than 100 kbit/s, which can be used only for transferring sensor data. Optical communications that use visible light can use a wider frequency range than acoustic communications, so they are suitable for high-speed communication. However, the transmission distance for high-speed communication is limited because the turbidity of seawater attenuates visible light. Because it is difficult to use flexible wireless communications underwater, unmanned exploration vehicles for resource exploration and underwater equipment for port construction are often connected to support vessels by wired cables for remote control. However, there are problems with equipment costs and personnel for handling the cable as well as with cables being swept away by the ocean currents. Small underwater drones, i.e., general-purpose remotely operated vehicles (ROVs), have appeared on the market, and many trials are being conducted to replace the tasks previously performed by divers, such as inspection of port facilities and fishing equipment, with ROVs. In such attempts, cable handling interferes with operations. In summary, the market for underwater equipment, such as ROVs, is expanding, but wired communications at sea interfere with the flexible operation of underwater equipment. Therefore, there is a strong demand for Mbit/s-class wireless communication technology that can transfer detailed video in real time without cables. NTT Network Innovation Laboratories is conducting R&D on higher-speed, longer-distance, and more stable underwater acoustic communications toward achieving extreme coverage extension undersea [2]. 2. Underwater acoustic communication technologyIn underwater acoustic communications, it is difficult to achieve high-speed and stable communications due to the unique underwater environment and the characteristics of sound waves. A factor hindering high-speed transmission is delayed waves, which are caused by sound waves reflecting off the sea surface, seabed, or quays. A sound wave transmitted underwater arrives at the receiver not only as a direct wave but also as delayed waves through various paths, and the combination of these waves at the receiver results in distorted waves. To demodulate such received signals to achieve successful communication, the received signal should be compensated by inverse characteristics derived from estimated wave distortion. In underwater acoustic communications, the propagation speed of sound waves is around 1500 m/s, which is 200,000 times slower than that of terrestrial radio, so it causes larger and different propagation delays for each path. Each path is also affected by different Doppler shifts*1 due to fluctuations in the sea surface and vessels equipped with communication devices, resulting in drastic and complex fluctuations in the propagation path. Therefore, the distortion-compensation techniques used in terrestrial wireless communication systems cannot overcome this propagation-path variation. Environmental noise, such as noise from marine life, is one of the factors that impairs the stability of acoustic communications. Snapping shrimp, which live in shallow waters around the world, are sources of environmental noise because they make snapping sounds with their claws when intimidating prey. This snapping is very loud, disrupting the stability of underwater acoustic communications. In response to these problems, NTT Network Innovation Laboratories proposed the spatio-temporal equalization technique to achieve higher-speed communications and environmental-noise-resistance-improvement technique to achieve stable communications [3–6]. The use of the two techniques in underwater acoustic communication technology is shown in Fig. 1. The spatio-temporal equalization technique suppresses the effect of delayed waves caused by sea-surface reflections and extracts only the direct wave. This technique enhances the duration the propagation path is stable by removing the effect of delayed waves and improves compensation performance, thus contributing to increasing the data rate. Delayed waves are suppressed spatially and temporally by processing signals received at multiple antennas, i.e., forming the null of receiving directivity for the arrival directions of delayed waves. The environmental-noise-resistance-improvement technique controls the equalizer and error correction based on the assumption that loud environmental noise, such as snapping, temporarily contaminates the received signal. By suppressing the effect of environmental noise, this technique contributes to achieving stable transmission even in noisy environments.
We confirmed the effectiveness of each technique in achieving Mbit/s-class underwater acoustic communications through on-site experiments at sea. By the combined use of the spatio-temporal equalization technique and multi-input multi-output (MIMO)*2 transmission technique, high-speed transmission of 5 Mbit/s at a transmission distance of 18 m was achieved [4]. By integrating the environmental-noise-resistance-improvement technique and multi-carrier bandwidth-division transmission technique*3, we also confirmed the achievability of a data rate of more than 1 Mbit/s at a distance of 300 m [3]. With Mbit/s-class data-rate communication performance, the acoustic communication technology can handle streaming traffic of standard definition quality (i.e., 640 × 480 px) video. Compared with conventional underwater acoustic communication technologies, our Mbit/s-class underwater acoustic communication technology can expand use cases including the transfer of detailed underwater video.
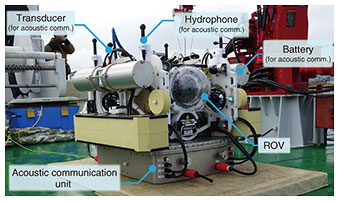
3. Wireless ROVWe consider a use case of Mbit/s-class high-speed acoustic communication technology involving a wireless ROV. NTT Network Innovation Laboratories developed the world’s first wireless ROV by using our underwater acoustic communication technology [3, 7]. Figure 2 shows the developed wireless ROV. The acoustic communication unit where the acoustic communication device and amplifiers are enclosed is located at the bottom of the ROV. At the top of the ROV, there are four transducers and four hydrophones that are used for transmitting and receiving acoustic signals, respectively. Batteries for the acoustic communication unit and buoyancy materials are attached on the sides of the ROV. The ROV can be wirelessly controlled and video can be wirelessly transferred for more than 2 hours.
4. Field demonstration of wireless ROVTo confirm the feasibility of the wireless ROV in a practical port environment, we conducted a demonstration experiment at Shimizu Port, Shizuoka City, Shizuoka Prefecture [7]. Figures 3 and 4 show the system configuration, and photos of the demonstration site, respectively. A control center with equipment for wirelessly controlling the ROV was located on a ship moored at sea. Steel pipes were installed around the ship as the equipment-inspection target for the wireless ROV. We verified that the operator in the control center can control the wireless ROV by watching the transferred video, taking advantage of the wireless functionality of the ROV.
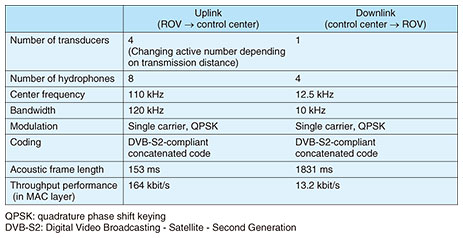
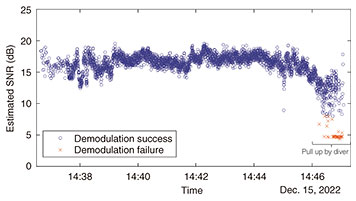
Bi-directional acoustic communications enable the remote control of the wireless ROV. The parameters for acoustic communications are summarized in Table 1. The data rates in the media access control (MAC) layer are 164 kbit/s and 13.2 kbit/s for uplink and downlink communications, respectively. In the uplink communications from the wireless ROV to the control center, video data and the wireless ROV’s attitudes were transferred. At the control personal computer (PC) in the control center, a video of 640 × 420 px, 10 fps was displayed, a clip of which is shown in Fig. 5. Figure 6 shows example results of the demodulation and estimated signal-to-noise ratio (SNR) of uplink communications measured during the demonstration. Except for the duration of sound waves blocked by air bubbles emitted by the diver pulling up the wireless ROV, all frames were demodulated successfully, and stable uplink communications were achieved. In the downlink communications from the control center to the wireless ROV, control commands were transferred. The operator manipulated the controller by referring to the video, and commands were successfully transferred to the wireless ROV via downlink communications. In addition to basic operations, such as observing each target steel pipe while watching transferred video, we conducted operations that are difficult for conventional wired ROVs, such as moving the ROV while dodging steel pipes and passing under the ship. The demonstration confirmed the flexibility of the wireless ROV.
Note that there may be restrictions on the size and weight of the wireless ROV equipment for underwater acoustic communications because the application of the target (i.e., the ROV) used in the demonstration was small. Also, the required data rate for transferring video is around 150 kbit/s; therefore, the equipment of the wireless ROV has limited performance, and the wireless ROV was operated with parameters that prioritize higher stability than a higher data rate. 5. ConclusionThis article described the R&D activities on underwater acoustic communications, including the feasibility demonstration of a wireless ROV. Toward achieving extreme coverage extension that enables underwater wireless communication services for various use cases, we will continue R&D of our underwater acoustic communication technology to achieve higher-speed, longer-distance, and more stable communications. We will also attempt to implement our underwater acoustic communication technology with NTT Group and partner companies. References
|
|||||||||||||||||||||