|
|||||||||
|
|
|||||||||
|
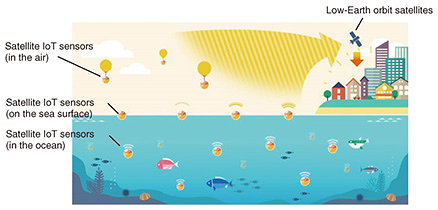
Feature Articles: Non-terrestrial Networks for Extreme Coverage Extension Vol. 21, No. 8, pp. 28–32, Aug. 2023. https://doi.org/10.53829/ntr202308fa3 Position-control Technologies of Oceanographic Equipment for Ultra-wide-area Ocean-atmosphere Observation TechnologyAbstractNTT Space Environment and Energy Laboratories is investigating global environmental futures forecasting technology, which reproduces Earth’s past and present in cyberspace and forecasts the future, with the aim of regenerating the global environment and environmental adaptation through global observations. In this article, we introduce ultra-wide-area ocean-atmosphere observation technology, which enables continuous, real-time, wide-area, high-density direct observation of the ocean on a global scale by using Internet-of-Things sensors, and discuss its main components, i.e., position-control technologies for observation equipment. Keywords: ultra-wide-area ocean-atmosphere observation technology, global environmental futures forecasting technology, typhoon observation  1. Initiatives for global environmental futures forecasting technologyNTT Space Environment and Energy Laboratories is investigating global environment futures forecasting technology [1], which reproduces Earth’s past and present in cyberspace and forecasts the future, with the aim of regenerating the global environment and environmental adaptation through global observations. The ocean, which covers 70% of the Earth’s surface area, involves extreme weather events, such as typhoons and linear precipitation zones, and greatly impacts our lives. It is important to enhance the direct observation data in the sea area for elucidating the mechanism and modeling of phenomena occurring in the ocean. However, due to various oceanic challenges related to power consumption, data communication, weather resistance, and position control, not enough observations have been conducted. In this article, we introduce ultra-wide-area ocean-atmosphere observation technology [2], which enables continuous, real-time, wide-area, high-density direct observation of the ocean on a global scale by using Internet-of-Things (IoT) sensors, and its main components, i.e., position-control technologies for observation equipment. 2. Ultra-wide-area ocean-atmosphere observation technologyUltra-wide-area ocean-atmosphere observation technology (Fig. 1) is an observation technology for achieving ultra-low power consumption and enabling low-cost observation by placing IoT sensors in all areas of the ocean, including unexplored areas where direct observation has been difficult. In collaboration with NTT’s Space Integrated Computing Network [3], observation data will be collected in real time from low-power wide-area radio waves emitted by IoT sensors via low-Earth orbit satellites and high-altitude platform stations. This technology will elucidate the mechanisms of meteorological phenomena, such as typhoons and linear precipitation zones, and marine ecosystems, such as microbes and nutrients, as well as acquiring oceanographic observation data that contribute to modeling the global environment in cyberspace. Remote sensing, which is mainly used for oceanographic observations, does not produce sufficient data both qualitatively and quantitatively, and several challenges unique to the ocean need to be addressed to enable continuous, real-time, wide-area, and high-density direct observation in the ocean.
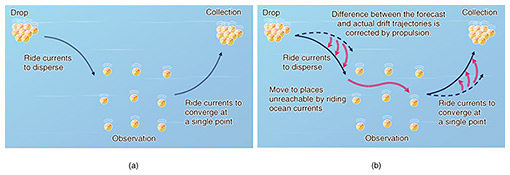
The four main challenges with observation equipment are: reducing power consumption, ensuring communication with land, improving weather resistance, and controlling position. 2.1 Reducing the power consumptionFor long-term oceanographic observations, it is essential to reduce the power consumption of observation equipment. Current oceanographic observations rely on batteries and photovoltaics for power, but battery replacement during the observation period is more difficult than on land, and solar photovoltaics are not able to provide power during rough weather. To enable long-term observations in the ocean, it is important to reduce the power consumption of onboard sensors and propulsion equipment. Longer observation periods reduce the frequency of equipment replacement, leading to lower observation costs. 2.2 Ensuring communication with landTo collect observation data in real time from equipment located anywhere on Earth, it is essential to be able to communicate with base stations in a wide area and in large quantities. It is currently possible to collect observation data in the ocean far from land, mainly by using satellite communication, but there are problems such as the limited amount of data that can be transmitted at one time and the high cost of communication. It is also necessary to stabilize the transmission and reception of data even in ocean environments where waves exist around the observation equipment. 2.3 Improving weather resistanceTo achieve stable oceanographic observations even in stormy weather such as typhoons, it is essential to improve the weather resistance of observation equipment so that observation can be conducted even in harsh environments. It is necessary to prevent electronic components of observation equipment used at sea from being damaged by submersion or salinity. It is also important to develop observation equipment to survive the harsh marine environment, e.g., constant swaying due to waves and wind, and strong winds and high waves such as during typhoons can cause fatal damage. 2.4 Controlling positionTo achieve wide-area and high-density observations in areas affected by currents and winds, it is essential to control the position of observation equipment. There is a method of mooring observation equipment to the seabed with cables to fix their positions, but it is difficult and expensive to install in deep-water areas. Positions can be controlled with a propulsion device such as a screw propeller or water jet, but observation periods will need to be shorter due to the large amount of power required to operate such a device. We introduce two position-control technologies of oceanographic equipment for ultra-wide-area ocean-atmosphere observation technology to mitigate the above problems. 3. Position-control technologies of oceanographic equipment for ultra-wide-area ocean-atmosphere observation technologyIn oceanographic observation using ultra-wide-area ocean-atmosphere observation technology, we aim to collect observation data by installing a large number of satellite IoT sensors evenly over a wide area. However, we need to collect these sensors for maintenance and replacement. Therefore, as shown in Fig. 2(a), if satellite IoT sensors are placed in one general area, it will be possible to observe that area by automatically moving the sensors so that their positions are in a grid. This is ideal to efficiently collect sensors when necessary. However, when using observation equipment that does not have a propulsion device, such as buoys, the observation density will be biased due to the equipment being carried on ocean currents and wind. Because it is also very expensive to recover a large number of observation equipment scattered in the ocean, they are currently abandoned instead of being recovered. Certain observation equipment uses a propulsion device powered by electric power to control movement, but it is not suitable for long-term oceanographic observations that require lower power consumption. To overcome these challenges and enable effective and efficient observation, it is necessary to develop and implement position-control technologies for placing satellite IoT sensors by using external forces such as ocean currents, waves, and wind. Therefore, we are researching and developing two position-control technologies to enable observation equipment to use ocean currents and winds for position control. One technology is based on drift-trajectory-prediction information [4]. Observation equipment in the sea is affected by currents and winds and drift on the sea surface, so this position-control technology uses the movement from this drift. The other technology is based on wave and wind propulsion technology. This technology uses waves and wind to add propulsion to observation equipment to control its position (Fig. 2(b)). We aim to enable oceanographic observation with position control without requiring electric power by combining these technologies.
3.1 Position-control technology with drift-trajectory-prediction informationDrift-trajectory prediction is a prediction of how a floating structure at a certain point will drift under the effect of currents and wind. Drift-trajectory prediction uses a model that shows how much the drift trajectory is affected by the shape of the floating structure and predicts the direction and amount of movement of the floating structure on the basis of the forecast data of ocean currents and wind by the Japan Meteorological Agency. The positions of satellite IoT sensors are controlled by predicting how they will move in the ocean and adjusting the location and time to install them. Current drift-trajectory prediction is not accurate enough; thus, it is essential to improve this accuracy. However, there is little observational data to compare forecasts with actual results. We aim to improve the accuracy of drift-trajectory prediction by continuously conducting such prediction during observations and accumulating observation data on the basis of predictions and actual results. In March 2023, drifting observations were conducted off the coast of Miyako Island, Okinawa, Japan, using a drifting buoy (Fig. 3) equipped with a water-temperature gauge and the Global Positioning System to verify the accuracy of drift-trajectory prediction. We modeled the effects of ocean currents and winds on drifting buoys to make drifting-trajectory predictions and conducted actual drifting observations to verify such predictions. By analyzing the causes of the discrepancy between drift-trajectory predictions and actual drift trajectories, we are developing prediction models and gathering necessary input data to improve prediction accuracy.
3.2 Wave and wind propulsion technologyIt is also important to add propulsion to observation equipment to modify the position of satellite IoT sensors when controlling their position at sea. We aim to develop a propulsion system that converts waves and wind directly into propulsion, which can be supplied infinitely from the surrounding environment. By using both wave and wind power as the power source, we are developing a technology that can flexibly provide propulsion in accordance with changes in the weather. We set a goal to produce small observation equipment (total length: 1 m, total weight: about 25 kg) that can be easily loaded onto ships during installation and recovery even if a very large amount of equipment is in operation. We are currently designing propulsion systems using wave and wind power and using simulators for virtual verification. Using the verification results as a basis, we will build a prototype of the equipment that uses propulsion-control technology to improve the oceanographic observations. 4. Future prospectsWe introduced ultra-wide-area ocean-atmosphere observation technology related to the position control of observation equipment. To enable long-term oceanographic observations, position-control technologies that do not depend on electric power is a major issue. With ultra-wide-area ocean-atmosphere observation technology, satellite IoT sensors are placed in the oceans on the basis of drift-trajectory prediction; thus, observations will be possible while controlling the equipment position using our wave and wind propulsion technology. By enriching observation data in ocean areas, it will be possible to accurately model physical phenomena such as ocean currents. We will also be able to gather a wide variety of data useful for the study of typhoons, linear precipitation zones, and ecosystems, as well as for various fields. In the summer of 2023, we will place drifting buoys in the path of typhoons using the drifting-trajectory prediction introduced in this article to monitor changes in sea temperatures before and after the passage of typhoons. References
|
|||||||||