|
|||||||||
|
|
|||||||||
|
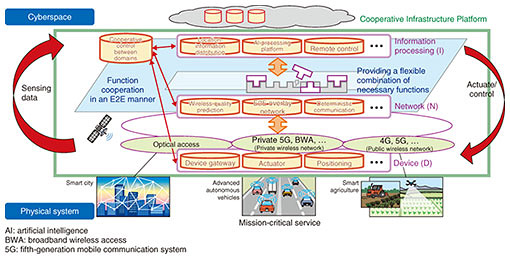
Feature Articles: Network-service Technologies Enabled by the All-Photonics Network for IOWN Vol. 19, No. 10, pp. 44–50, Oct. 2021. https://doi.org/10.53829/ntr202110fa5 Cooperative Infrastructure Platform for Delivering Mission-critical ServicesAbstractTo solve various social problems, we are researching the integration of network and computing technologies as social infrastructure. The Cooperative Infrastructure Platform being researched and developed at NTT Network Service Systems Laboratories is introduced in this article. To meet service requirements in an end-to-end manner and provide mission-critical services, this platform uses coordinated control among three domains—information processing, network, and device—in fields such as remote monitoring and control of autonomous agricultural machinery, advanced autonomous vehicles, and smart cities. Keywords: IOWN, All-Photonics Network, Cooperative Infrastructure Platform  1. BackgroundUnder the concept of cyber-physical systems (CPS), efforts are underway to collect various types of sensor information in the real world (the physical system) via networks, analyze the information collected in cyberspace constructed on an information-processing platform, and use the analysis results for controlling systems in the real world and distributing data between systems. As use cases of CPS [1] under the Innovative Optical and Wireless Network (IOWN), area management (such as surveillance cameras in smart cities), mobility management (such as autonomous vehicles), and industry management have been studied to enhance their functionality and develop new social infrastructures. Unlike the conventional Internet and cloud computing, a CPS must collect a large amount of information from a huge number of devices, such as cameras and sensors, and requires a mechanism to efficiently collect a huge amount of upstream traffic through the network. In use cases of self-driving buses and automated guided vehicles, feedback control (actuation) of the physical system is executed from cyberspace by using sensing information such as video streams and positional information of the physical system in a real-time manner. In such cases, not only the network but also the computing infrastructure that constitutes the cyberspace and system on the device side (i.e., the physical system) must satisfy the requirements for low latency and stable data processing on an end-to-end (E2E) basis. We give an overview on the technology of the Cooperative Infrastructure Platform we are developing—to provide mission-critical services (such as CPS) under IOWN—and describe a field demonstration of the platform in smart agriculture. 2. Overview of the Cooperative Infrastructure Platform2.1 Concept and basic architectureThe Cooperative Infrastructure Platform is an infrastructure technology for providing advanced services that cannot be provided by the conventional Internet or cloud computing by using the All-Photonics Network and various wireless networks and linking their functions with an information-processing infrastructure and device functions. The basic architecture of this platform is shown in Fig. 1. The platform consists of elemental and control functions in the information processing (I), network (N), and device (D) domains, which are cooperatively controlled to satisfy mission-critical service requirements in an E2E manner. The elemental functions of each domain are intended to be configurable by combining functions in accordance with the services to be provided. This will enable flexible disposition of functions as a foundation for multi-access edge computing and edge datacenters.
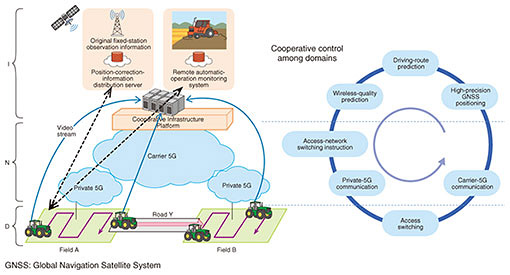
2.2 Cooperative control among domainsWe explain inter-domain cooperative control through the Cooperative Infrastructure Platform on the basis of specific use cases. A use case of automated driving of farm tractors and of the cooperative control of the tractor are outlined in Fig. 2. When an automated tractor moves from field A to field B, it must send a video stream for remote monitoring to the monitoring center via multiple wireless accesses via a private fifth-generation mobile communication system (5G) and carrier 5G, and in the event of an emergency, the system must be shut down remotely. The operator must therefore monitor and control the tractor remotely at all times, and the monitoring images and control signals must be transmitted without being affected by switching from one wireless network to another.
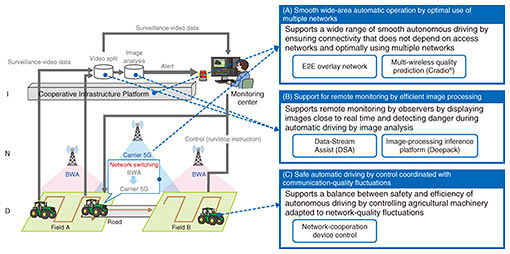
The procedure of the Cooperative Infrastructure Platform is outlined as follows. First, the position of the tractor is measured using a high-precision Global Navigation Satellite System installed on the tractor. Next, the driving route is predicted on the basis of the obtained positioning information, and the quality of the wireless network at the future location is predicted. If the network quality is predicted to degrade to the extent that the transmission of monitoring images or control signals is affected, the wireless network is switched from private 5G to carrier 5G, for example, before the quality actually degrades. Cooperative operation of the I, N, and D domains in this manner enables seamless switching between multiple wireless networks. 3. Initiatives for applying the Cooperative Infrastructure Platform to smart agricultureNTT Network Service Systems Laboratories is working on applying the Cooperative Infrastructure Platform to agriculture, which is facing labor shortages due to declining birthrate and aging population. Under an industry-academia-government collaboration agreement between Hokkaido University, the city of Iwamizawa, Hokkaido, NTT, NTT EAST, and NTT DOCOMO, we have been researching and developing technology for achieving world-class smart agriculture by using cutting-edge robotics and IOWN information and communication technology. In November 2020, we conducted a demonstration experiment [2] in Iwamizawa. The benefits provided by our platform are discussed below with a focus on the experiment. 3.1 Challenges concerning level-3 autonomous driving of agricultural machineryOne of the issues attracting attention in the agricultural field is level-3 automated driving of agricultural machinery, i.e., monitoring and controlling the machinery from locations far from the field such as monitoring centers. As in the case of cars, automation of agricultural machinery is categorized as different levels, and level-2 agricultural machinery that can operate automatically in an unattended state (but under the user’s visual supervision) has been commercialized. The user monitors the target agricultural machinery and carries out emergency operations, such as stopping the machinery in case of danger, either by direct visual observation from around the field or using a tablet via a local communication network such as a wireless local area network. Note that such commercially available automated agricultural machinery is equipped with cameras and distance sensors to autonomously detect hazards and automatically stop the machinery. For level-3 automated driving, monitoring images and control information must be transmitted between remote locations and the agricultural machinery via communication networks such as 5G/Long-Term Evolution (LTE). In addition to covering agricultural work in fields, level-3 includes driving in sheds and on roads connecting fields. Enabling remote monitoring control of multiple agricultural machinery from a remote monitoring center should result in further labor saving regarding all agricultural work using agricultural machinery and development of new businesses based on the sharing model. However, to conduct surveillance control remotely, in addition to transferring the video from machinery with high quality, it is necessary for the remote operator to carry out an emergency stop if the surveillance video indicates an impending emergency, and achieving stable remote monitoring with low latency across the entire system (including the network) is a technical challenge. 3.2 Field demonstration of automated driving of agricultural machinery using the Cooperative Infrastructure PlatformAs mentioned above, the Cooperative Infrastructure Platform aims to provide the added value necessary for networks as social infrastructure by cooperatively operating multiple elemental technologies. The overall structure of the content demonstrated in Iwamizawa and an overview of the operation in each scenario are shown in Figs. 3 and 4.
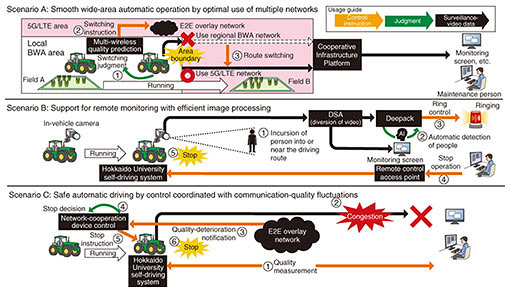
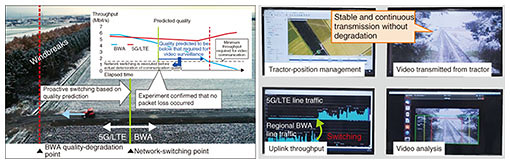
In scenario A, as a component of cooperative-infrastructure-platform technology, an uninterrupted network is implemented, and stable remote monitoring and control of autonomous driving is achieved. In particular, E2E overlay network technology and multi-wireless-quality-prediction technology (Cradio®) [3] are used to enable agricultural machinery to run automatically across multiple networks. This automatic running is enabled by automatically switching to an appropriate network before communication quality fluctuates or deteriorates, as predicted using artificial intelligence. The results of a demonstration in which a farm tractor was driven automatically on a farm road in Iwamizawa are shown in Fig. 5. In this demonstration, the network was successfully switched automatically—without interrupting communication—by using the above-mentioned technologies.
In scenario B, the processing of the video stream for remote monitoring is streamlined using a stream-merge function that efficiently processes multiple video streams, and utilization efficiency of server capacity for image analysis of such obstacle detection is improved using an inference-processing platform technology that optimizes various resources such as central processing units and graphics processing units. In addition, Data-Stream-Assist technology [4] enables simultaneous use of real-time video for multiple purposes (such as remote monitoring and image analysis) while reducing network load by replicating video streams at the packet level with low delay for such multiple applications. In scenario C, network-cooperation device-control technology is used to support the control of agricultural machinery in response to changes in network quality. The effectiveness of this technology in terms of automatically stopping a tractor safely when the network quality deteriorated to the level at which the surveillance video could not be transmitted was confirmed. 4. Future developmentsThe Cooperative Infrastructure Platform we are developing to provide mission-critical services under IOWN was discussed, and a field demonstration of remote monitoring and control of automated tractor driving conducted in the city of Iwamizawa, Hokkaido was described. In the future, we will expand the applicability of the Cooperative Infrastructure Platform and establish an integrated architecture and elemental technologies through studying use cases of high-speed moving vehicles (such as advanced autonomous vehicles) in addition to smart agriculture. References
|
|||||||||