|
|||||||
|
|
|||||||
       |
Feature Articles: NTT Group Activities in the Transportation Field Vol. 14, No. 7, pp. 18–24, July 2016. https://doi.org/10.53829/ntr201607fa4 Development of Map Platform Technology to Innovate Seamless NavigationAbstractThe introduction of four quasi-zenith satellites (in 2018) and advances in indoor positioning technology are expected to usher in a high-accuracy positioning society by 2020. Under such a high-accuracy positioning environment, in order to provide services that take advantage of the environment, we need to build a spatial information infrastructure, which includes maps. This article introduces our efforts to innovate map platform technology, which serves as the basis for developing various services in a high-accuracy positioning society, and the technical verification of seamless navigation, a new service that utilizes the map platform. Keywords: seamless, 2.5D map platform technology, pedestrian navigation
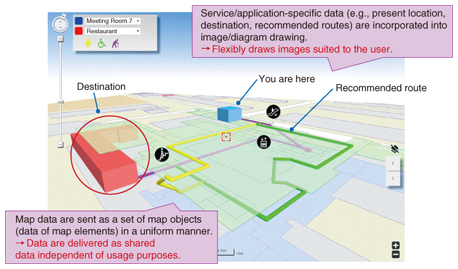
1. IntroductionNew products and services that integrate geospatial information and positioning technologies with information and communication technologies have been progressively emerging in recent years. Progress in this area is so rapid that some people are predicting that by 2020, automatically operated cars will be running on highways, and automatically operated construction machines will be working at construction sites. Such products and services are expected to have a significant impact on our daily lives and to help build a more convenient, safe, and secure social environment. For example, even when people are in a strange place, they will not need to feel nervous because a click on their smartphone will enable it to guide the user through a complex underground mall or station in a manner that is appropriate considering the state of congestion in that location. The smartphone may even be able to automatically call a taxi. By sending information about the precise position to cars cruising automatically in the vicinity, users may be able to protect themselves against the risk of traffic accidents. Such a society is called a high-accuracy positioning society. To achieve it, the Ministry of Land, Infrastructure, Transport and Tourism launched the High-Accuracy Positioning Society Project. This project promotes studies and feasibility tests on the spatial information platform for creating services that utilize indoor/outdoor positioning technology and map information, and on the required means and organizations for constructing the platform efficiently and effectively. It is expected that private companies will accelerate the creation of a diverse range of services by using this platform. Various services are expected to be launched that will benefit society. The one we are focusing on is a seamless navigation service intended for guiding the user from his/her current location to the desired destination seamlessly and reliably, whether the route lies indoors or outdoors. We explain in this article our activities focused on developing map platform technology that will support the seamless navigation service. 2. Development of technologies for innovating seamless navigationTwo key technologies are necessary to achieve seamless navigation. One is map platform technology, which makes it possible to search for and display information (map information) about the surroundings. This includes graphic information such as topographic maps and the shapes of buildings, as well as information associated with them such as the names and attributes of buildings and facilities. The other is high-accuracy positioning technology, which pinpoints the user’s current location with a high degree of accuracy. We are undertaking research and development (R&D) in the area of map platform technology, where we can draw on the elemental technologies that we have developed over time such as information search and text analysis and on our know-how regarding operation of a large-scale database. Three relevant R&D results are introduced below. 2.1 Parametric Map Platform TechnologyServices that utilize electronic maps are already in widespread use. Many such services are regularly used on portal sites or through smartphone applications. As a rule, such conventional map services generate an image from map information that the service provider maintains and deliver it to the user’s terminal where it is displayed. The upsides of this type of service are that data can be provided in a uniform manner for any service and that the processing load on terminals is low. The downsides are that it is difficult to vary the manner of map display for different services, and there are restrictions on adding service-specific information to a map. To solve these problems, we have developed Parametric Map Platform Technology, which is a new platform technology for delivering and displaying maps. This makes it possible to create a different map for each different service and even for each user, or to create a new map by adding new information to an existing map. This technology delivers map data not in the form of a graph but in the form of data. It is the user terminal that creates a map from the delivered data. This makes it possible to flexibly create a map that is suitable for a particular service or for the particular situation of the user. Map information delivered by the service provider can be kept intact, and new information can be added to suit the user’s situation or need. For example, it will become possible to emphasize a landmark that is useful for navigation, such as a turning point on the route to a destination, by displaying it in 3D (three dimensions) (Fig. 1).
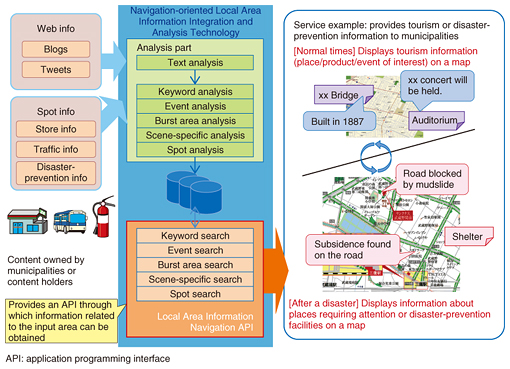
2.2 Navigation-oriented Local Area Information Integration and Analysis TechnologyA large volume of text data transmitted daily via social media (blogs, social networking services, etc.) includes many items of information related to certain areas such as buildings/stores, stations, and streets. Few of these text messages indicate the exact location (e.g., address) of the object concerned. Therefore, it has been difficult to associate an object with a point on a map, except in cases where GPS (Global Positioning System) information is provided, as is the case in some media. To solve this problem, we have developed Navigation-oriented Local Area Information Integration and Analysis Technology (Fig. 2), which analyzes location-related information (e.g., partial place names, station names, or store names) contained in transmitted text data in order to find the exact location and the subject matter of the text message.
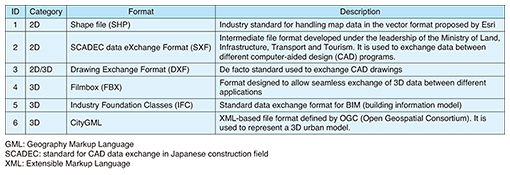
For example, this technology can extract from social media sources fresh word-of-mouth information about an area, a building/store, a station, or a street on a map, and deliver it to the user using Parametric Map Platform Technology in order to suggest a route that might be interesting to the user at that time. 2.3 Seamless Navigation Information Management Platform TechnologyTo build a high-accuracy positioning environment and use it for services, it is necessary to develop a spatial information infrastructure. In particular, it is necessary to strengthen map information itself because it is essential that map information about all places (not only outdoor areas but also inside commercial buildings, underground malls, stations, etc.) within the range of our daily lives is available and ready for use. However, the reality is that whereas there is an extensive volume of public and uniform digital information available on outdoor spaces that was created by the Geospatial Information Authority of Japan, indoor spatial information such as indoor floor maps has been created and used individually by different building owners. The data formats (Table 1) and the degree of precision of such data are so varied that it is virtually impossible to integrate them into cohesive indoor spatial data.
As a solution, we are developing Seamless Navigation Information Management Platform Technology. This will enable us to collaborate with building/facility owners that have such map data in order to maintain and expand the map data. The assumption is that graphic data such as topographic maps and buildings and attribute information such as building/store names and facility information will be provided by different owners at different intervals. The technology will offer capabilities for data conversion, data search/editing, and conditional data output (areas defined by longitudes and latitudes, building stories, attributes, etc.) in order to make it possible to input spatial data into a common coordinates base and to manage/edit and output data. We also assume that map data created in this manner will be able to be processed using the Parametric Map Platform Technology in order to generate data that can be used for navigation. Since indoor floor plan data and attribute information will be added to the map data, the volume of data will be substantially larger than that included in a conventional map. We are studying ways to reduce the volume of communication and increase the processing speed by using a large volume of data for areas near the recommended route but a small volume of data for other areas. 3. Technical verificationIt is important in R&D to create technology and improve it, but it is just as important to actually try it out and get feedback on its performance. In particular, navigation-related technology is not confined to terminals, applications, and users; it is only useful when it works in real places and environments. We evaluated the technologies that we developed by taking part in a feasibility test conducted as part of the High-Accuracy Positioning Society Project. We selected this test because it allowed us to try out our technologies and the concept of seamless navigation (Fig. 3) and to use various high-accuracy positioning technologies that were already available on the market [1].
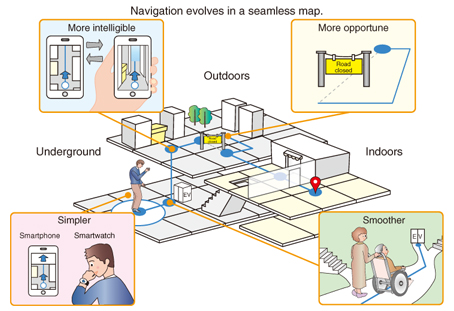
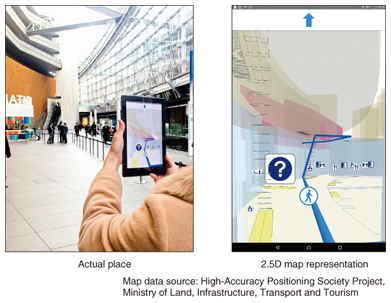
We used the Parametric Map Platform Technology to create a 2.5D map (flat plane + multiple floor levels) (Fig. 4) from the indoor map data provided. The 2.5D map represented both indoor and outdoor entrances and the floors of buildings both below and above ground level. We developed and tested an application that provided navigational information to the user based on passive triggers detected from the user’s natural movements such as the manner of walking and the manner of holding a terminal, rather than from active clicks on menu buttons [2].
We confirmed that our technologies generally worked well in generating indoor/outdoor seamless maps and in providing navigation with a sufficient degree of tracking and response in the given indoor/outdoor positioning environment. In addition, we confirmed that the 2.5D map was an intuitive and easy-to-understand map representation. It was particularly useful for presenting a route to the back of a building or a route involving going up or down to different floors in a building. We also identified a number of issues that need to be addressed. They include interruption of navigation at locations where positioning data fluctuated widely—such as narrow streets between buildings and indoor/outdoor entrances—and the difficulty in representing the heights of buildings and the layout of indoor facilities (e.g., determining which of several facilities is located in the front or in the back). We will study these issues as part of our ongoing technological development. 4. Future prospectsServices such as seamless navigation services intended for individuals in a high-accuracy positioning society cannot be realized solely through the technologies that we are developing. For example, we alone cannot develop high-accuracy positioning. These services cannot be realized without collaborative efforts by various players in both the public and private sectors such as by establishing a scheme and organization for maintaining and updating extensive map data. As a part of such collaboration, we plan to improve the technologies introduced here and create new technologies that will serve as a platform for producing new applications and services. References
|
||||||