|
|||
|
|
|||
       |
Feature Articles: Further Exploring Communication Science Vol. 16, No. 11, pp. 35–40, Nov. 2018. https://doi.org/10.53829/ntr201811fa5 Cross-media Scene Analysis: Estimating Objects’ Visuals Only from AudioAbstractHuman beings can get a visual image of the surrounding environment from sounds they hear. Can we give similar capabilities to computers? In this article, we introduce our recent efforts in cross-media scene analysis applied to estimate the type, location, and visual shape of objects in a scene based only on sound sources recorded with multiple microphones. Keywords: cross media, scene analysis, deep learning
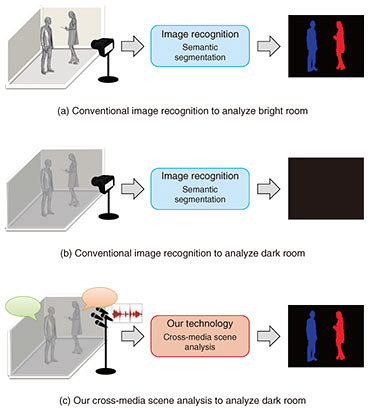
1. IntroductionThe success of deep learning has completely changed the framework of media processing and recognition. Deep learning has already delivered superhuman performance that can be applied to address many problems in image and audio recognition. More important is that although media processing technologies for different types of media (e.g., images, video, audio, sound, and language) had at one time mostly been studied and developed independently, they are now being looked at together as their frameworks are similar. In this article, we introduce cross-media scene analysis technology that can predict image recognition results only from sound information. As the number of people who are interested in security/safety increases day by day, the importance of surveillance and crime prevention technology is increasing. Most such technologies achieve excellent performance by leveraging advanced image recognition techniques. However, such technologies are probably not applicable in very dark places or rooms that have many blind spots, or in private or public spaces where privacy is prioritized and cameras are prohibited. Our technology aims to provide visual recognition functionality without using any camera devices. This will make it possible to provide safe and comfortable monitoring even in those places where normal image recognition technologies cannot be used. 2. Cross-media scene analysisHuman beings recognize and understand their surrounding environments using their eyes and ears. More interestingly, we integrate and use these signals cross-sectionally to estimate the states of a scene. For example, when we are walking on a road and suddenly catch the sound of a car coming from behind us, we can infer how far away it is and possibly even what type of car it is without actually turning around and looking at the car. What we aim to do here is to equip a computer with this kind of human ability. More specifically, the technology introduced in this article is designed to predict an image recognition result as if it had been photographed and recognized by a camera, using only the sound recorded by microphones. An example of a use case of our technology is shown in Fig. 1. Suppose there are two people in a room and the objective is to automatically recognize them using a computer. The initial idea would be to install a camera in the room and recognize them by using image recognition technology. If semantic segmentation technology is used, it is possible to detect not only the presence or absence of people, but also their locations and postures in silhouette form, as shown in Fig. 1(a). However, this approach would not work if the room was very dark or was a place where cameras are prohibited (Fig. 1(b)).
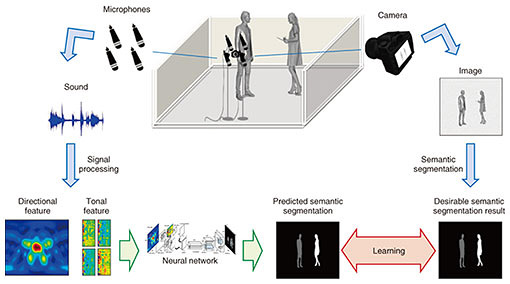
However, our technology can still be applied in such cases. Our technology uses audio information recorded by multiple microphones to deliver semantic segmentation results, instead of using a camera (Fig. 1(c)). If two people in the room are talking, their voices are recorded by the microphone arrays. With this sound information, our technology directly predicts the expected semantic segmentation result. To achieve this, we need to know (1) what kind of sound is coming from which direction, and (2) what kind of object (and its shape) is generating the sound. These details are respectively determined by signal processing and deep learning. Imagine that a sound occurs at some location and is captured by multiple microphones. In this case, microphones closer to the source catch the sound earlier than the more distant ones. By analyzing this time difference of arrival, we can extract a directional feature that indicates the direction of the sound source. Furthermore, by analyzing the frequency information of the sound captured by each microphone, we can obtain a tonal feature that is useful to identify the type of the sound source (e.g., whether it sounds like a human voice or a train running on a track). With these features, we can determine the direction and the type of sound source. However, this information is not enough to recover a visual silhouette of the sound source representing the position and shape as compared to the semantic segmentation result. Therefore, a deep neural network is used to estimate the type, shape, and position of the object. The overall setup is illustrated in Fig. 2. The neural network receives directional and tonal features as inputs and is trained to output the semantic segmentation result directly from them. This is the core part of our technology that uses deep learning to convert media types from audio to visual. This is why we call our technology cross-media scene analysis. To train the network, we need to have a pair consisting of a desirable semantic segmentation result and corresponding audio features. Of course, a camera is needed to collect such data for training, but it is not necessary for actual recognition. With this process, we can build a basic mechanism to predict semantic segmentation results using only sound.
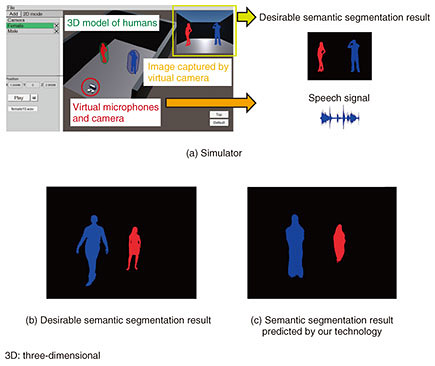
3. Proof of conceptWe have conducted various experiments to evaluate how well our technology can predict actual semantic segmentation results from sound. We describe a few examples here. First, we introduce an experiment using simulation data that was conducted to verify the feasibility of this technology in an ideal situation. We developed a simulator that can reconstruct a virtual room and generate conversational voices of people speaking and their corresponding semantic segmentation result simultaneously (Fig. 3(a)). We can freely change the size of the room, arrange people (three-dimensional models), the virtual microphones and camera, and simulate sounds recorded by the microphones taking the reverberation and echo of the room into account. At the same time, we can also simulate the image of the room taken by the camera and obtain the corresponding semantic segmentation result of the scene. Hence, we can train our neural network and measure how accurate the semantic segmentation result predicted by our technology is by comparing it to the desirable one. We show an example of the desirable semantic segmentation result and the result predicted with our technology in Fig. 3(b) and (c), respectively. Although the predicted result does not accurately recover details of posture and shape, we can see that the distance and rough shape can be successfully predicted by our technology.
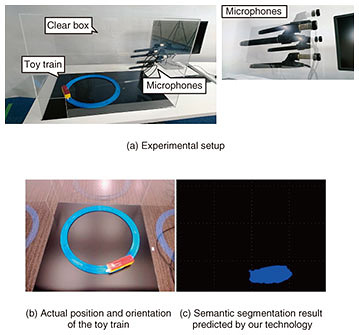
Next, we describe an experiment done on real sounds. The task was to estimate the position and orientation of a toy train based on its running noise. Our evaluation setup is shown in Fig. 4(a). It consisted of a toy train running on a circumferentially connected rail and four microphones connected to a personal computer in which our technology was installed. The entire setup was covered by a clear acrylic box. An example of the semantic segmentation result predicted by our technology is shown in Fig. 4(c). The blue region represents the silhouette of the train. Compared to the position and orientation of the real train (Fig. 4(b)), we can see that the estimated position and orientation are roughly consistent with it, even though it is a little blurry. This shows that our technology can be applied to sounds other than human voices.
4. Future developmentWe will continue working to improve and demonstrate our technology toward application to a more natural space. To date, we have successfully verified the technology in structured environments such as those reconstructed by our simulator or the clear box. However, we need to make our method more robust in order to apply it in more realistic situations where more complex types of noise exist. The types of objects that can currently be recognized by our method are limited (people and toy trains), so we will work to expand those and test for more diverse categories. We will continue to improve our technology to achieve secure monitoring with arbitrary media information suitable for the situation. |
||