|
|||||||||
|
|
|||||||||
       |
Feature Articles: Ultra-realistic Communication with Kirari! Technology Vol. 16, No. 12, pp. 12–18, Dec. 2018. https://doi.org/10.53829/ntr201812fa2 Real-time Extraction of Objects from Any Background Using Machine LearningAbstractNTT Service Evolution Laboratories is conducting research and development on the Kirari! ultra-realistic communication system, which can make an athlete or performer in a remote location seem to be right before the viewer’s eyes. This article describes a system that can extract objects from an arbitrary background in real time, which is essential for realistic remote presentation of athletes and performers using pseudo-three-dimensional video and other techniques. Keywords: image segmentation, machine learning, ultra-realism
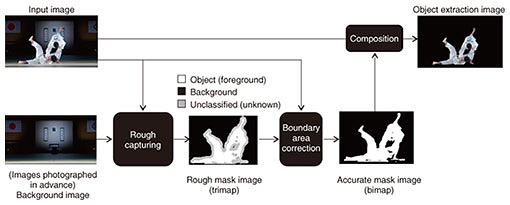
1. IntroductionThe ability to accurately identify the region of a person or object within an image is an essential technology for performing high-quality image editing and composition, and it is therefore a major research theme in computer vision. Selecting the object region is also essential for achieving realism in the Kirari! ultra-realistic communication system when performing pseudo-three-dimensional video display. In the article “Real-time Extraction of Objects with Arbitrary Backgrounds” [1], NTT Service Evolution Laboratories proposed a system able to extract only the object region in real time from video of a sports venue or performance stage, without using studio equipment such as a green screen. This article introduces a system that can extract object regions with greater accuracy. It was developed by introducing machine learning to distinguish more subtle differences in feature values that have been indistinguishable earlier and generating feature values of the object being extracted using infrared light. 2. Framework for real-time object extraction using machine learningBackground subtraction is a common method for extracting objects in real time. Background subtraction involves finding the differences between the input image and a background image and applying a threshold to identify changes as the object area. This method is fast and requires little preparation, so it is widely used. However, there are challenges with this method, including the difficulty in deciding an appropriate threshold value and the inability to support backgrounds that change. We have developed an object extraction method that uses a neural network (NN) to convert input feature vectors to a different feature space and perform the discrimination. With the NN, we hope to derive a feature space for making discriminations within the NN using training data provided beforehand and to automatically convert to this more suitable feature space. Inputs other than the image being detected, for example, reference images with features of the object, images from different times, region information, and infrared images, can also be included and will also be converted to suitable feature spaces in the NN in order to perform object extraction using higher-order feature values of the background and object. This should make operations such as changing the background more robust. The workflow for the system we developed is shown in Fig. 1. Object extraction is done in two steps. In the first step, the object region is selected using a rough mask image (a trimap*1), and in the second step, a matting process*2 dependent on this trimap creates a more accurate object region. Machine learning is used to capture trimap in the first step.
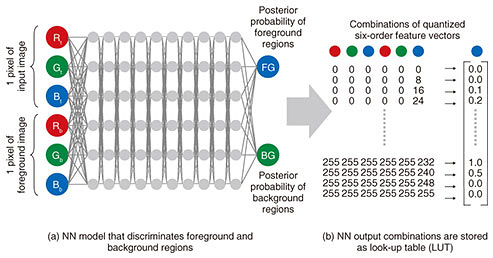
Machine learning is divided broadly into training and application processes. In the training process, parameters in the NN model are learned from training data. This process is shown in Fig. 2. Training data are first prepared. Background images that do not contain the object, and sample images that do contain the object are obtained, and correct mask images are created. Then, input feature vectors are created. These feature vectors combine target pixels from the sample image corresponding to the foreground area in the mask, with the corresponding pixels from the background image. These combinations are used to train for the foreground region. Similarly, input feature vectors combining the background pixels from the sample image and corresponding pixels from the background image are created, and these combinations are used to train for the background region.
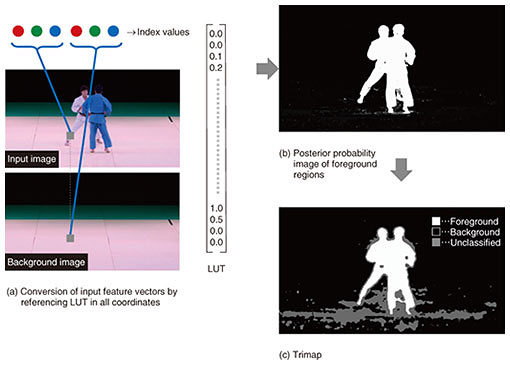
In this way, we obtained an NN model able to discriminate the foreground from the background regions for combinations of input target pixels and background image pixels (Fig. 2(a)). Generally, NN processing requires large computing resources, so we increased speed by implementing processing using a look-up table (LUT). We reduced the number of gradations in the input feature vectors by quantizing them and stored all combinations of quantized input feature vectors and NN outputs as an LUT (Fig. 2(b)). Note that in Fig. 2, we describe this process in terms of RGB (red, green, and blue color model) pixels for simplicity, but the input vectors can include more than color information, for example, image position. The process for applying the LUT to generate the trimap is shown in Fig. 3. A quantized input feature vector is derived in a process similar to that for the machine learning process, and this derived feature vector is used to reference the LUT, rapidly determining a posterior probability that the pixel in question is in the foreground (Fig. 3(b)). The trimap is generated from the derived foreground-posterior-probability image by setting regions that are not clearly foreground or background to the unclassified region (Fig. 3(c)). The unclassified region in the trimap is discriminated by using a nearest-neighbor search with information about whether pixels neighboring the pixel in question and having similar feature vectors were classified as foreground or background.
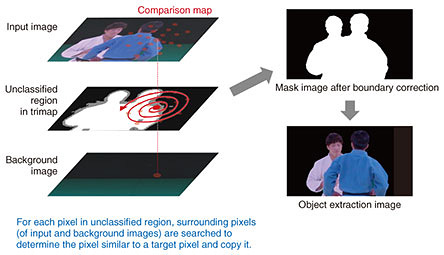
The details of this nearest-neighbor search are shown in Fig. 4. For each pixel in the unclassified region, a spiral search in the local neighborhood is done to determine whether the pixel is more similar to a foreground pixel or a background pixel, and this is used to derive an alpha value for the pixel. The object is then extracted using the derived alpha values. By introducing this boundary correction process, we can extract objects based on information from the pixel itself and also from surrounding pixels. We also provide a framework for optimizing this process such as by processing the rough mask on a low-resolution image, or by performing only the magnification process on all pixels.
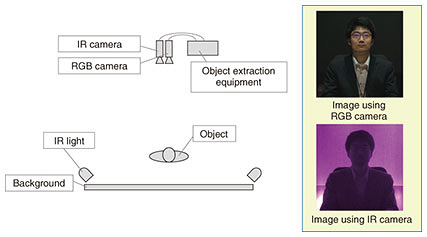
3. Real-time extraction of objects from backgrounds of similar color using infraredEven though machine learning is used to automatically convert input feature vectors to a high-order feature space within the NN, we are still extracting objects based on color and shape information, so it is theoretically impossible to separate cases when the input feature vectors are the same. For this reason, we developed an object extraction system using RGB and infrared (IR) cameras, utilizing IR light that is invisible to the naked eye in an attempt to add new features. The object extraction photography environment using the RGB and IR cameras is shown in Fig. 5. An RGB camera and an IR camera were placed side by side, respectively capturing visible light and IR images. The background was illuminated with IR, while deliberately preventing IR light from reflecting from the object. In this way, the background appeared brighter in the IR image, while the object was relatively dark.
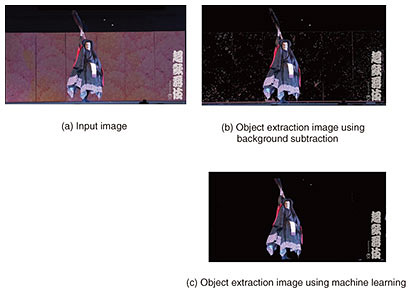
In the RGB camera image in Fig. 5, the background and the person are of the same color, so it is difficult to distinguish them based on color, but the person’s silhouette can be obtained from the IR camera image. Then, to extract the object accurately from the IR camera image, we correct for the parallax between the IR camera and the RGB camera. To perform the correction, photos of a calibration board were taken beforehand, a projection transform from the IR image was derived so that the same feature points from the IR camera and the RGB camera aligned, and this transform was applied. By adding the IR image obtained in this way to the input of machine learning, we were able to extract objects using new features other than color and shape. 4. Evaluation experimentsWe developed a real-time object extraction system using machine learning and used it in the Cho-Kabuki play called “Tsumoru Omoi Hana no Kaomise,” at the Niconico Chokaigi event held in April 2018 at Makuhari Messe, Chiba, Japan. The system developed is capable of 3840 × 2160 resolution video at a frame rate of 60 fps, but for this trial, a resolution of 1920 × 1080 and a frame rate of 59.94 fps were used for compatibility with other systems. In the climax scene of the Cho-Kabuki main production, Koretaka-shinno, played by Shido Nakamura II, emerges from the screen in real time as the stage video background changes, while the confrontation with Princess Hatsune Ono, played by virtual personality, Miku Hatsune, comes to its peak. Samples of the video at that point are shown in Fig. 6. The board behind Koretaka-shinno is being held by stage-hands, so it is not steady, and the image cannot be extracted well using background subtraction (Fig. 6(b)). We showed that it can be extracted more accurately using our system using machine learning (Fig. 6(c)).
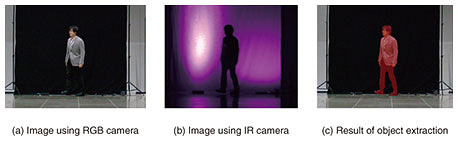
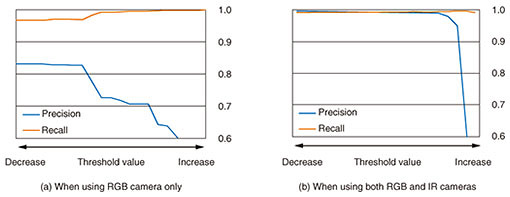
We also checked the effect of using the IR camera (Fig. 7). We were able to confirm that objects can be extracted accurately, even in cases where it was difficult using an RGB camera. In this case, we did not do the automatic conversion of input feature vectors to a high order feature space or the threshold processing in the NN training, but we evaluated how robust the method using the IR camera would be by applying background subtraction and changing the threshold values (Fig. 8). We confirmed that using the IR camera enabled us to achieve very reproducible results as well as stable operation, even when the threshold values changed considerably.
We have introduced cases using an IR camera, but other characteristics suitable for extracting objects, depending on the conditions, can be input to the system, for example, depth maps generated using stereo cameras or LiDAR (light detection and ranging). 5. Future prospectsThis article introduced a highly accurate object extraction method based on high-order feature values of objects, using machine learning to convert input feature vectors to a new feature space and performing the discrimination within an NN. We also introduced the use of features based on IR light, which is not visible to the naked eye, to handle use cases where this extraction is difficult using only an RGB camera. In the future, to consider semantics when performing object extraction, we will work to perform object extraction using deep learning in real time and also study methods for extracting objects accurately when there are occlusions. Reference
|
||||||||