|
|||||||||||||||||
|
|
|||||||||||||||||
       |
Feature Articles: Network Technology for Digital Society of the Future—Research and Development of Competitive Network Infrastructure Technologies Vol. 17, No. 6, pp. 8–12, June 2019. https://doi.org/10.53829/ntr201906fa3 Positional Information Service with High Added Value Based on Cooperation between GNSS and NetworksAbstractAt NTT Network Technology Laboratories, with a view to implementing a smart world that accelerates digital transformations, we are developing technology that improves the precision of positioning measurements made using GPS (Global Positioning System) and other forms of GNSS (global navigation satellite systems) in urban canyon environments with many high-rise buildings. We are also developing technology that can dramatically improve the positioning measurements by doing some of the positioning calculations on cloud edge nodes, resulting in services with new added value. Keywords: GNSS, GPS, positioning
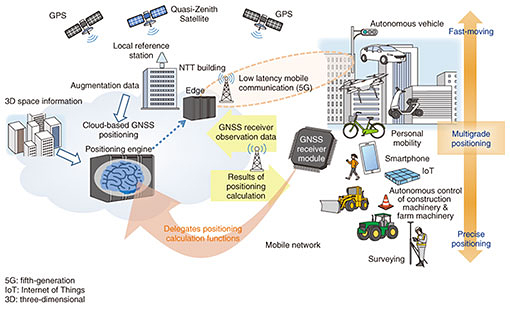
1. IntroductionThe Global Positioning System (GPS) has been used for car navigation and other consumer applications since the 1990s, and nowadays, global navigation satellite systems (GNSS) are used in a wide range of applications including smartphones. In Japan, the Quasi-Zenith Satellite System (the Japanese GPS) went into full-scale operation in November 2018 and has attracted great interest due to its ability to achieve highly accurate positioning using augmentation signals. At NTT Network Technology Laboratories, we are conducting research and development aimed at using GNSS and network/cloud synergy to create new added value in the field of positioning measurements in order to achieve a smart world where digital transformations are accelerated. Although navigation satellite signals ideally enable positions to be measured with high precision anywhere on Earth, the actual positioning accuracy is greatly affected by the satellite signal reception environment. Previous efforts to address this issue have mostly involved attempts to improve the performance of GNSS receivers. However, as we move towards the realization of the Internet of Things, where all devices are connected to the network, our aim is to provide a groundbreaking solution to this issue by delegating part of the GNSS positioning calculations to cloud edge nodes and to provide new added value in positioning information. 2. Diversification of GNSS positioning function deployment, and a cloud-based GNSS positioning architectureAs shown in Fig. 1, GNSS positioning is used in various applications. While fast-moving objects such as autonomous vehicles require high-frequency positioning information, other applications such as surveying require highly accurate positioning information for static locations. Smartphones and car navigation systems use a method called code-based positioning*1 that can achieve a positioning accuracy of a few meters, while surveying uses a method called carrier-phase based positioning*2 that is capable of measuring positions to within a matter of centimeters.
In carrier-phase based positioning, sophisticated arithmetic processing is needed to solve the problem of wavenumber ambiguity.*3 These needs have hitherto been met by general-purpose GNSS receiver products compatible with code-based positioning and high-end GNSS receiver products for special applications compatible with carrier-phase based positioning, which have been used according to the requirements of each application. The high cost of receiver products that support carrier-phase based positioning is one factor that has hindered the growth of such applications. Furthermore, different applications have diverse requirements in terms of factors including the accuracy and frequency of positioning measurements and the cost and power consumption of equipment, and it is becoming difficult to cover these requirements with a receiver chip (hardware). A cloud-based GNSS positioning architecture enables inexpensive general-purpose GNSS receivers to be used at positioning locations by delegating part of the positioning calculations to the cloud. In this way, differences in positioning methods and their performance requirements for specific applications can be absorbed into the processing performed in the cloud. Specifically, we have come up with a new GNSS positioning architecture whereby a single receiver can be used to provide multigrade positioning capabilities (Fig. 1). Ultimately, the positioning calculations are performed not inside the GNSS receiver at the positioning point but in the cloud based on observation data*4 transferred from the receiver. The results of these positioning calculations (coordinate values) are sent back to the positioning point. This architecture uses computing resources based on CPUs (central processing units) and GPUs (graphics processing units) that are abundant on cloud edge nodes, and these perform advanced positioning processing including satellite selection processing. Carrier-phase based positioning not only greatly reduces the time required for initial positioning calculations, but also has the advantage of being able to seamlessly select diverse augmentation signals, including the NTT building’s local reference station. Other innovative approaches may also be considered, including the use of artificial intelligence, machine learning, or geospatial information such as two-dimensional (2D) maps and 3D building data to process GNSS positioning. It is also possible to consider advanced collaboration with various cloud-based applications that utilize location information. The number of general-purpose GNSS receiver products that support the output of observation data has been increasing recently, and some products support multiple frequency bands (multiband). In addition, with smartphones, some terminals running Android version 7 and above are able to acquire observation data of the built-in GNSS receiver via APIs (application programming interfaces), and it is expected that the number of such terminals will increase greatly in the future. A-GNSS (Assisted GNSS)*5 has been introduced in cellphones and smartphones to exploit the synergy between GNSS and networks, but a cloud-based GNSS positioning architecture can be regarded as a more advanced form of synergy. GNSS positioning calculations have hitherto been performed inside the GNSS receiver chipset. However, the functional deployment of these calculations is expected to become more diverse in the future, with calculations performed not only in the cloud, but also in smartphone apps, in-vehicle processors, and so on. Our aim is to provide the flexibility that allows functions to be deployed optimally for each application while keeping up with future trends.
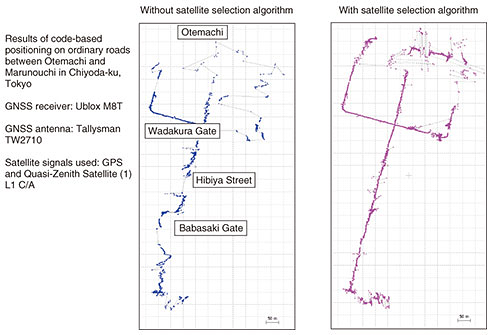
3. Case study: smart mobilityIn this section, we describe how positioning measurements can be implemented in moving vehicles as an example of the application of cloud-based GNSS positioning architecture to smart mobility. In an urban canyon reception environment consisting of high-rise buildings with a grid-like system of roads, there are few open spaces where satellite signals can be received as direct line-of-sight signals. Instead, these signals are reflected and refracted by buildings, resulting in multipath signals that greatly diminish the accuracy of positioning calculations. We show in Fig. 2 the results of performing code-based positioning calculations by post-processing using signals from GPS and the Quasi-Zenith Satellite System collected by a general-purpose single-band GNSS receiver as used by car navigation systems and the like while traveling on an ordinary road in Tokyo’s Marunouchi district. By applying our Smart Satellite Selection*6 algorithm, which screens the received satellite signals for candidate signals that are suitable for positioning calculations, we confirmed that it is possible to greatly improve the positioning accuracy even at points that were estimated to be far from the road when using conventional technology [1]. This satellite selection step only took about 5 ms per positioning point in the environment used for this verification experiment.
The control of autonomous vehicles is expected to be a complex process involving the use of lasers, lidar, odometry, gyroscopes, accelerometers, dynamic maps, and in-vehicle cameras, but GNSS positioning requires measurements that are accurate enough to determine which lane a vehicle is traveling in. Using observation data from GPS satellites collected by the above-mentioned single-band GNSS receiver along the Inner Circular Route (Shuto Expressway), we confirmed that the application of our satellite selection algorithm to the results of carrier-phase based positioning (VRS-RTK: virtual reference station real-time kinematic) calculations performed by post-processing can deliver convergent (fix) solutions more of the time (i.e., a higher fix rate). Since a fix solution is assumed to provide positioning results that are accurate to within a few tens of centimeters, they can be used to estimate not only the lane in which a vehicle is traveling, but also the position of the vehicle within the lane. The initial positioning calculation time that is required to re-establish a fix solution after GNSS satellite signals have been temporarily lost (e.g., while passing through tunnels or under bridges) is also less than 10 s and is expected to become even shorter when using a multiband GNSS receiver. When positioning calculations have to be performed at a high frequency of about 10 times per second, a positioning engine could conceivably be installed at a cloud edge node as shown in Fig. 1 and accessed via 5G (fifth-generation) low latency mobile communications modes such as URLLC (ultra-reliable and low latency communications). This architecture also helps to reduce the cost of in-vehicle equipment, which presents a barrier to the spread of automatic driving.
4. Future prospectsIn the field of smart mobility, connected cars equipped with communication means such as C-V2X (cellular-vehicle to everything) will become widespread, and it may become possible to implement low latency broadband communications from one vehicle to another (V2V: vehicle to vehicle) and between vehicles and roads (V2I: vehicle to infrastructure). This technology comprehensively ascertains the positions of people and vehicles and is therefore expected to be applied to a wide range of fields, including ascertaining the positions of pedestrians and cyclists at junctions with poor visibility, ascertaining the positions of passengers in vehicle allocation services, increasing the efficiency of bus services, and creating barrier-free maps. It may also have applications in large-scale events and the management of transportation in disaster situations. We will study ways in which high-precision positioning technology can be applied to positional information services of this sort, including the use of advanced cooperation. Reference
|
||||||||||||||||