|
|||||||||||||||
|
|
|||||||||||||||
       |
Feature Articles: Digital Transformation of Urban Areas Focusing on Mobility Vol. 19, No. 1, pp. 22–29, Jan. 2021. https://doi.org/10.53829/ntr202101fa4 Use of 4D Digital PlatformTM for MobilityAbstractWhile the evolution of various forms of mobility, such as cars, have enriched our lives, there are concerns over deepening social problems related to road transport. This article focuses on the 4D digital platformTM, which integrates many types of sensing data in real time to enable various predictions, and introduces our current effort and future prospects for solving social problems and creating value related to road transport centering on mobility, particularly regarding a cooperative connected-car platform. Keywords: 4D digital platform, connected car, ITS
1. NTT’s vision and activities in the mobility areaThe evolution of various forms of mobility, such as cars, have enriched our lives. However, changes in social structures, such as declining birthrate, aging population, and population concentration in urban areas, have given rise to concerns over the following deepening social problems related to road transport:
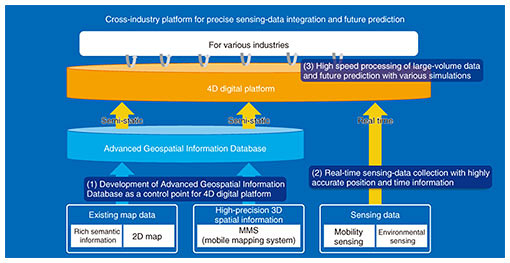
Against the background of these social problems, automakers are conducting research and development (R&D) and demonstration experiments in collaboration with other industries to upgrade connected-car services and implement multimodal mobility as a service (MaaS). The Japanese government is also promoting R&D on common issues (cooperative domains) that need to be tackled through industry-academia-government collaboration. Advances in connected cars and autonomous driving have made communication networks an essential infrastructure for them. The NTT Group is working to solve social problems and create new value through digital transformation of mobility. This article focuses on the four-dimensional (4D) digital platformTM, which the NTT Group is now developing as a platform that can handle various types of data in an integrated manner, and describes value that the platform can provide for smooth road-traffic flow from the perspective of mobility, in particular, in cooperative intelligent transport systems (ITSs). 2. Background of the 4D digital platformThe remarkable advancement in information technology (IT) has enabled the collection of a large volume of Internet of Things (IoT) data and their analysis. Accordingly, the Japanese government and various companies are engaged in R&D with the aim of developing systems that merge cyberspace and the physical space, such as those proposed for Society 5.0. However, in the linkage of statistical data sets or the matching of misaligned position and time data, there are cases in which the accuracy of future predictions cannot be heightened. To tackle this challenge, NTT has undertaken R&D of a 4D digital platform, making it possible to precisely integrate position and time information from sensing data in real time while also providing latitude, longitude, height, and time data useful for future predictions. 3. Overview and value creation with the 4D digital platformAs shown in Fig. 1, the 4D digital platform integrates sensing data in real time into the Advanced Geospatial Information Database with its highly precise and abundant semantic information and executes a variety of high-speed analyses. The following are three main features of the platform.
(1) Development of the Advanced Geospatial Information Database as a control point for the 4D digital platform
(2) Real-time sensing-data collection with highly accurate position and time information
(3) High-speed processing of large-volume data and future prediction through various simulations
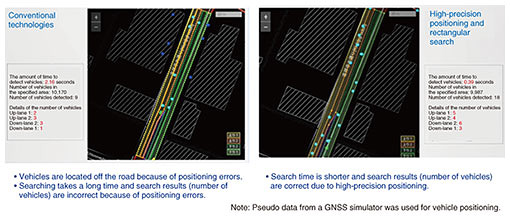
By combining the collection of high-precision sensing data and high-speed processing of large-volume data using this platform, we demonstrated the obtaining of precise and high-speed vehicle positions in real space that could not be achieved with conventional technologies. Figure 4 shows a demonstration of vehicle-position tracking on a per-lane basis by combining the aforementioned Axispot with Smart Satellite Selection to improve positioning and time synchronization accuracy in urban areas. In this demonstration, using the area near Kichijoji Station, Tokyo, as an example, plotting of vehicle position by satellite positioning and a search of the number of vehicles per lane were carried out.
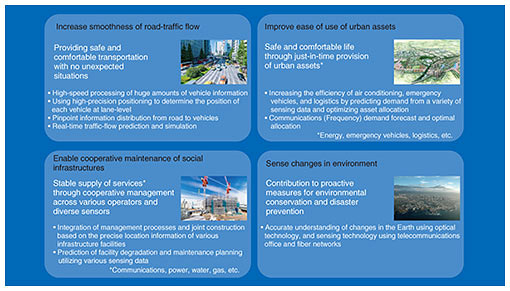
With conventional technology (left in Fig. 4), satellite-positioning errors occurred in front of Kichijoji Station, which is surrounded by high-rise buildings, and the locations of vehicles plotted on the map were off the road. Furthermore, since it takes a long time to conduct a rectangular search for vehicles that match the lane shape, the number of vehicles could not be measured in time, and the final search result (number of vehicles by lane) was not correct. In contrast, when the technologies of the 4D digital platform were applied (right in Fig. 4), the vehicle positions were correctly plotted on the map by high-precision satellite positioning, and rectangular search was conducted at high speed, so the search results for each lane were correct. By combining these functional groups and data, we believe they will be used in a variety of fields such as road-traffic rectification, optimal use of urban assets, and maintenance and management of social infrastructure, as shown in Fig. 5.
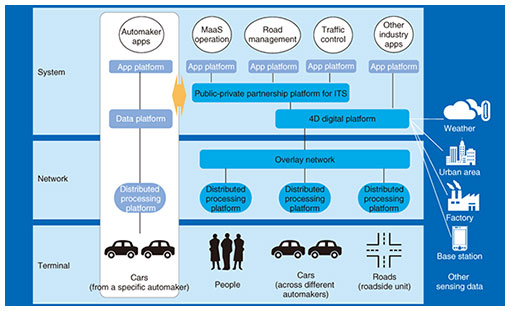
4. Use of the 4D digital platform in the mobility fieldAs described earlier, the Japanese government is aiming to upgrade mobility services using information and communication technology (ICT) to solve social problems using future autonomous driving and create a society in which everyone can enjoy a high quality of life. To this end, it is promoting R&D of common issues (cooperative domain) that need to be tackled through industry-academia-government collaboration. The NTT Group aims to enhance the efficiency and safety of urban transport by gaining an overall picture of traffic, which is considered difficult to achieve only with autonomous driving systems in individual vehicles. To this end, the NTT Group is aiming to contribute to the development of a cooperative connected-car platform, which handles vehicles and various data in an integrated manner using different types of communication (Fig. 6).
To achieve efficient and safe urban transport, it is necessary to build an efficient and high-speed network architecture, which is made possible by distributed processing platforms, and collect data on people, vehicles, and roads over a wide area using an overlay network. In the system layer, the 4D digital platform is used to store traffic-related sensing data in the Advanced Geospatial Information Database and correct (assimilate) the data so that traffic-related sensing data can be integrated with other types of sensing data and be searched for and extracted at high speed. Data for which time and location are precisely aligned on the 4D digital platform will be used on the public-private partnership platform for ITS and mobility and on other industry platforms. 5. Use cases of 4D digital platform in the mobility fieldThe following describes what becomes technically feasible with the 4D digital platform when geographical traffic-related data are collected, aligned, and integrated on the platform. It also explains the R&D direction concerning the technologies used in these use cases. (1) Reducing the number of traffic accidents Dynamic dangers (objects fallen onto a road, pedestrian rushing into the road, and blind spots behind an idling car and at an intersection) can lead to serious accidents. One use case is to detect such dangers early, identify their positions quickly and accurately, and transmit information to nearby vehicles so that they can avoid accidents.
(2) Reducing or resolving traffic congestion Traffic congestion causes significant economic loss, particularly in urban areas. To mitigate traffic congestion, peak traffic volumes can be levelled off by controlling traffic signals to reflect the traffic volume and by configuring roads and lanes appropriately.
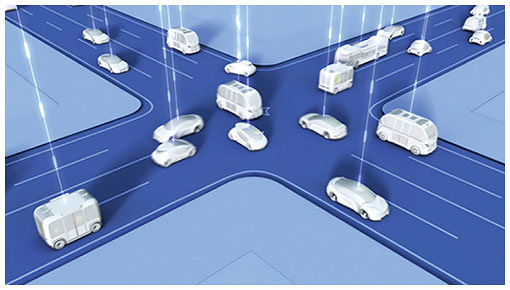
6. Future prospects—ultimate level of mobility society through IOWNWith the Innovative Optical and Wireless Network (IOWN), which provides high-speed, low-latency, high-reliability networks and a high-speed processing platform, as well as the approaches and technologies described in this article, we believe it is possible to achieve the ultimate level of harmonic mobility with the highest level of safety and security and a society in which people, vehicles, and the infrastructure cooperate in a close-knit manner. For example, overall optimized control along with autonomous driving control in individual vehicles will enable vehicles to cross without incident at a lightless intersection (Fig. 7). In the event of an accident or a disaster, vehicles can receive optimal guidance to minimize damage.
Achieving this comes with various challenges. We will pursue social implementation of the 4D digital platform by leveraging the characteristics of IOWN technologies as follows:
7. ConclusionThe architecture for a cooperative-connected-car platform using the 4D digital platform and related technologies described in this article is extremely challenging. Various stakeholders, such as the government, automakers, map companies, and communications and IT companies, need to collaborate to study not only technical aspects but also business viability and social receptivity. Since various unexpected events can occur in actual transport, we believe that all segments of society must work together to address mobility problems, including implementation of extremely sophisticated traffic control and traffic infrastructure, and conduct studies of legal systems and ethical issues. With a view to providing platforms that support and services that enrich the lives of people, particularly concerning mobility, the NTT Group aims to make the most of its technologies, expertise, and assets toward this goal in collaboration with its partners. References
|
||||||||||||||