|
|||||||||||||||
|
|
|||||||||||||||
       |
Feature Articles: NTT’s Medical and Health Vision toward Creation of Bio-digital Twin Vol. 19, No. 7, pp. 46–51, July 2021. https://doi.org/10.53829/ntr202107fa6 Bionics Technology for the Future of Medicine and HealthAbstractBionics is a discipline that elucidates the structure and function of living organisms—by using engineering techniques and theories—and applies that knowledge in the form of new technologies. Developing technologies that interactively connect biological and engineering systems is key in creating a bio-digital twin and developing technologies for medicine and healthcare. In this article, bionics technologies developed by NTT Basic Research Laboratories and NTT Service Evolution Laboratories are introduced. Keywords: bionics, microphysiological system, cybernetics
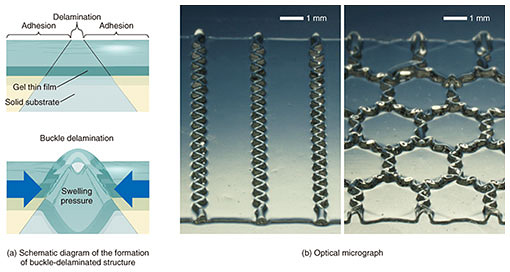
1. Approaches to bio-functional device technology for acquiring biometric informationBionics is currently trending in two directions. One direction is from biology to engineering, namely, to artificially reproduce the functions and structures of living organisms. Advances in semiconductor-microfabrication technology and three-dimensional (3D) printing technology have made it possible to reproduce surface shapes and 3D structures that mimic living organisms even on the nano- and micrometer scales. Microphysiological systems (MPS) have been attracting attention that combines such microstructures with various cells to create functions and structures of organs. By creating a scaffold structure for cell culture by microprocessing, it is possible to artificially reproduce the tiny spaces in the living body and the physiological environment for mechanical stimulation by, for example, blood flow and stretching movement. Therefore, higher-order in-vivo functions that cannot be implemented using conventional culture methods should be expressed in vitro, enabling highly accurate and multifaceted observation and evaluation. Such in-vitro devices that imitate the heart, liver, kidneys, and other organs have been reported [1]. The construction of a fully reproduced model of a single organ or of interaction between different organs by linking multiple organs has unlimited potential. Such a model could be applied to drug discovery, such as accurate prediction of pharmacokinetics in relation to particular organs. It could also be used to enable the acquisition and analysis of personalized biological information at the molecular, tissue, and organ levels, which are tasks necessary to create a bio-digital twin. Most MPS devices are consist of a rubbery material called polydimethylsiloxane, which is highly processable, transparent, and oxygen permeable. To stably express higher-order functions in cells for a long period and interact with the outside world through molecules secreted and absorbed by cells, it is important to approach the biological environment from the material level. With this in mind, NTT Basic Research Laboratories focused on hydrogel, a material that is more like living organisms since it is a soft material that contains a lot of water and can stand on its own as a thin and hollow tubular structure like blood vessels or intestinal tubes. An example application of hydrogel is in contact lenses. In a hydrogel, polymers (consisting of low-molecular-weight compounds) and aggregates of molecules form a network structure like a jungle gym, which can retain a large amount of water inside it. This structure is similar to an extracellular matrix, which is a scaffold of cells in the living body, and exhibits high biocompatibility. It has unique functions not found in ordinary solid materials, such as water-mediated permeability of small molecules and volume changes due to inflow and outflow of water. In this article, we introduce the technology for processing hydrogels for implementing MPS devices that can reproduce the dynamics of an in-vivo environment, such as inflow and outflow of material and shape change. 2. Formation of 3D structure of hydrogel on the basis of buckle delaminationA physical phenomenon called buckle delamination was investigated as a means of fabricating a hydrogel. When a piece of paper placed on a desk is compressed from both ends, the center of the paper is raised and curved, transforming it into an arch-like structure. This phenomenon is referred to as buckle delamination, namely, the material buckles and delaminates from the substrate underneath it. We previously developed a method of applying this phenomenon to form hydrogel thin films [2]. Examples of such hydrogel thin films are shown in Fig. 1. The first step of the film-formation process is to define the delamination points by patterning adhesive molecules on a solid substrate by using conventional photolithography. The hydrogel is then formed on the substrate in a manner that produces a hydrogel thin film bonded to the substrate in a certain pattern. The hydrogel is then exposed to water, which causes it to swell as it absorbs the water. This water absorption compresses the hydrogel thin film by swelling pressure and induces buckling and delamination, specifically at the non-adhered parts of the body (Fig. 1(a)). The structure to be formed is controlled by physical parameters, such as hardness, thickness, and swelling degree of hydrogel, and the geometric structure of non-adhered body parts, and it can be processed into various 3D shapes (Fig. 1(b)).
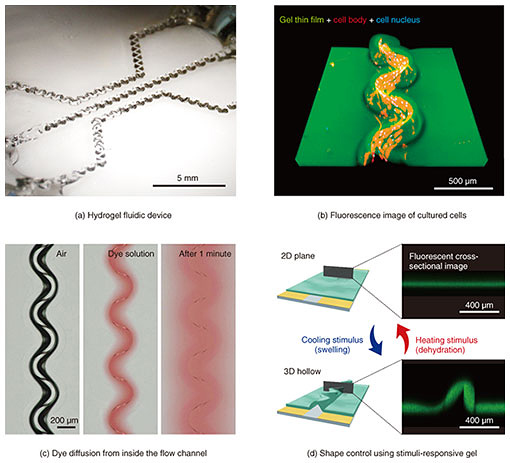
3. Future developments regarding this directionApplication of a device using three features of the above hydrogel-thin-film technology is shown in Fig. 2. (1) A buckle-delaminated structure can be induced with good reproducibility by drawing a 2D pattern of the desired bonded and non-bonded regions on a large area. It is thus possible to freely create meandering, parallel, and merging flow-channel structures, which can be used as microfluidic devices based on hydrogel thin films (Fig. 2(a)) [3]. (2) The hetero-structure of the device (i.e., hydrogel and solid substrate) allows each function of the device to be designed individually. Cell culture in the flow channel and material diffusion outside the channel are possible (Figs. 2(b) and (c)). By implementing sensor elements on the solid-substrate side, it should be possible to develop devices that can measure the environment in real time in a manner that mimics a living body. (3) Since the processing method is based on a universal physical phenomenon, it can be adapted to various types of hydrogels, and functions can be added. By using a stimuli-responsive gel (the water content of which can be controlled in response to thermal stimuli) as a base material, it is possible to dynamically control the structure in response to stimuli (Fig. 2(d)). By developing and combining these elemental features, it is believed possible to develop technology that can acquire multifaceted data while reproducing biological functions on a device.
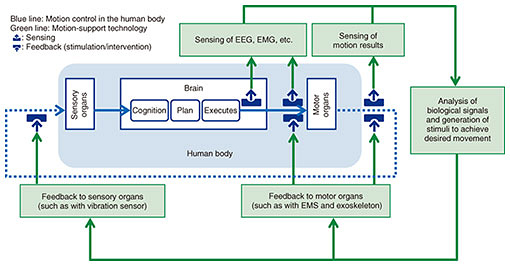
4. Initiatives concerning cybernetics technology for supporting people with disabilitiesThe other direction in bionics is engineering to living organisms. The purpose behind this direction is to apply communication theory and control theory to the mechanisms of information transmission and control within the body. In particular, cybernetics [4], proposed by Norbert Wiener in 1948, which has continued to be important, is the concept of handling communication and control in living organisms and machines in a unified manner. At NTT Service Evolution Laboratories, we are paying renewed attention to this concept. Regarding our initiatives concerning cybernetics technology, we are developing technologies to support and extend human motor skills. Regarding motor control in the human body, stimuli received by the sensory organs are perceived and recognized by the brain. Then, motion instructions issued according to the action plan in the brain are transmitted to the motor organs, which executes the plan by contracting the muscles that make up the motor organs (Fig. 3). This process is repeated as a cycle; namely, the result of the action received by the sensory organs is taken as a new stimulus.
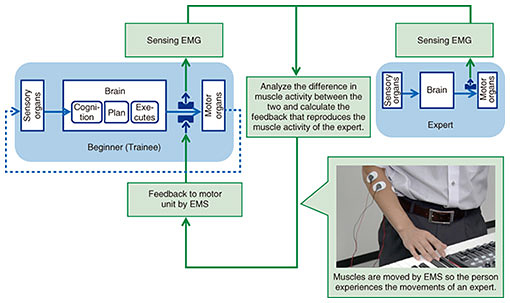
We are intervening in this cycle by using the following methods to understand and improve motor status: (i) sensing biological signals (such as electroencephalography (EEG) and electromyography (EMG)) and motion results and (ii) providing feedback (so-called stimulation and intervention) to the sensory and motor organs via tactile stimulation such as vibration, electrical muscle stimulation (EMS), and the exoskeleton. We have started to analyze the sensed biological signals and generate feedback to achieve the desired motion. 5. Support and extension of motion by using biological signalsWe now introduce the concept of motion support and augmentation by sensing, analyzing, and feeding back biological signals. Our goal is to create a world in which anyone can more skillfully control their own motor functions while executing daily activities and various skills on the basis of the movements of others (experts) and their own past movements. In other words, we want to temporarily or permanently expand people’s ability by reproducing and experiencing movements. Two example possibilities are (i) reproduction of the movements of experts and effective training by repeating those movements and (ii) rehabilitation tailored to the current physical condition of patients on the basis of their experience of exercise when they were younger. Motion support for a tremolo performance (a technique by which notes that are far apart are played alternately) on piano [5] is given as an example (Fig. 4). Beginners play while focused on moving the fingers, while experts play while focused on rotating the wrist. On the basis of that consideration, EMG is sensed as the biological signals of a beginner (trainee) and expert, and the difference in muscle activities between the two (e.g., the difference in strengths of each muscle type) is analyzed by comparing the two signals. Feedback to reproduce the muscle activity of an expert (e.g., muscle contraction by EMS) is then calculated. The calculated muscle activity is then fed back to the beginner’s (trainee’s) body.
The photo in Fig. 4 shows that the hand of the user is moved by presenting EMS to the muscles that rotate the wrist (the supinator and pronator teres muscles) to enable the user to experience the movements of the expert. We are currently evaluating whether effective training can be achieved through this experience. Although the example shown in the figure is an initiative focusing on myoelectricity, we are also studying biological signals other than myoelectricity, such as brain waves. 6. Future developments regarding this directionVarious exercises, such as stretching, grabbing an object, pressing a button, standing, and walking, are important in daily activities, social participation, and self-expression. However, some people are forced to live with limited mobility due to disabilities or aging, and we have high expectations for supporting the mobility for people with such limitations. There are various approaches of sensing (e.g., using EEG and EMG) and feedback (e.g., using EMS and exoskeletons), and it is assumed that they will become more sophisticated. For example, technologies and products (e.g., prosthetic hands) that are expected to function reliably for specific body parts and for specific motions during daily use as support for disabled people must be extended to cover more body parts and accommodate complex motions. As that requirement is satisfied, the amount of biological sensing information and control information used for feedback will become more complex, and it will be necessary to handle such information in a coordinated manner, as described in the previous section. At NTT Service Evolution Laboratories, we have been working on bio-sensing technologies on the basis of signals such as EMG [6], feedback technologies using tactile stimulation and EMS, and support for people with disabilities. By taking advantage of our accumulated technological strengths, such as bio-sensing and feedback technologies, we believe that we can assist and support the expansion of application to other body parts and handling of complex movements from the perspective of information and communication technology. We will continue to study the application of cybernetics technology to training and rehabilitation for supporting people with disabilities. References
|
||||||||||||||