|
|||||||||||||||||||
|
|
|||||||||||||||||||
       |
Feature Articles: Adapting to the Changing Present and Creating a Sustainable Future Vol. 20, No. 10, pp. 61–66, Oct. 2022. https://doi.org/10.53829/ntr202210fa9 Smart Traffic Coordination via Learnable Digital Twins—Future Possibilities of Distributed Deep LearningAbstractInstead of controlling individual systems (Internet of Things (IoT) devices, smartphones, servers, etc.), which is the current mainstream, NTT Communication Science Laboratories aims to coordinate and control an overall system consisting of a set of IoT devices via digital twins. I report on the latest research projects regarding optimal coordination of overall IoT devices using collective intelligence in digital twins, i.e., (i) traffic coordination of autonomous vehicles and (ii) federated learning on datacenter networks. Keywords: digital twin computing, traffic coordination, distributed learning
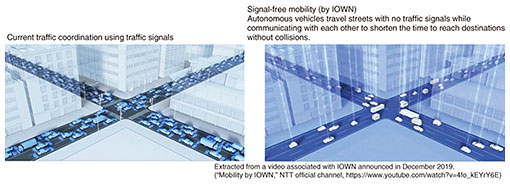
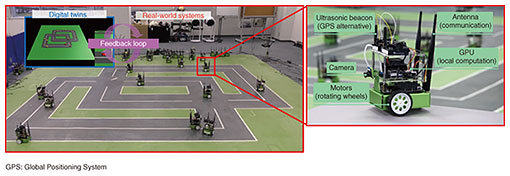
1. IntroductionIt has become commonplace to use advanced machine learning technology via e.g., voice commands on smartphones. The future of the machine learning field will be learning collective intelligence for efficient use of individual systems (Internet of Things (IoT) devices, smartphones, servers, etc.). I believe that a possible innovation in this field will be optimal coordination and control of an overall system consisting of many IoT devices, e.g., autonomous vehicles on traffic networks, servers on datacenter networks, and power plants on energy networks. In this article, I introduce two research projects regarding collective intelligence learning via digital twins. 2. Signal-free mobility projectFuture information and communication technology is expected to enable an advanced mobility society in which people, vehicles, and infrastructure cooperate with each other to provide further safety and efficiency. In the Innovative Optical and Wireless Network (IOWN), signal-free mobility is presented as a concept of this advanced mobility society. As shown in Fig. 1, vehicles autonomously travel streets with no traffic signals while communicating with each other to shorten the time to reach destinations without collisions. As the first step in achieving signal-free mobility, NTT Communication Science Laboratories is tackling the problem of traffic coordination in a distributed manner [1].
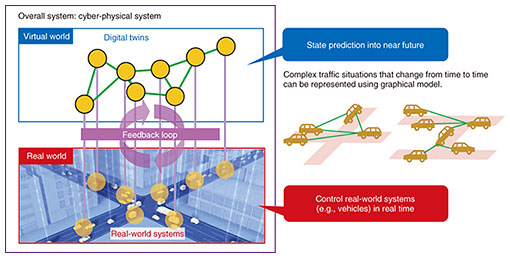
Signal-free mobility aims to predict optimal vehicle states to shorten travel time without collisions via feedback between digital twins and real vehicles. To achieve optimal coordination and control of a huge number of vehicles in real time, state transition should be distributed, i.e., by alternatingly repeating computation in each vehicle and communication among vehicles. Therefore, the main research topic is to formulate learnable digital twins to predict the optimal states of a complex overall system in a distributed manner. Digital twins can be modeled using a graph composed of vehicles (nodes shown as yellow vertices) and their connections (edges shown in green connection lines), as shown in Fig. 2. Although overall traffic is a very complex system that changes from time to time, this graphical model can represent traffic as a combination of simple components, i.e., local state prediction of each vehicle and communication among neighboring vehicles.
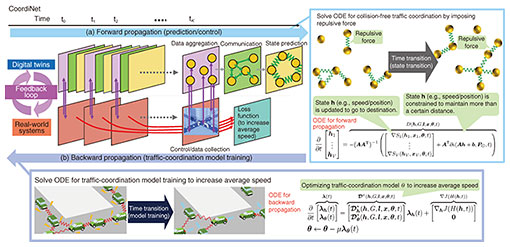
Computation procedures on digital twins for traffic coordination is illustrated in Fig. 3. In forward propagation (Fig. 3(a), left to right), time evolution of both optimal state transition on digital twins and feedback control of real vehicles is illustrated. This is composed of alternating the repeating of multiple steps, i.e., observation-data collection (e.g., image sets of surrounding travel/road situations), calculation of local vehicle state and repulsive force to maintain more than a certain distance between vehicles, and information exchange through communications among neighboring vehicles. To enable real-time traffic coordination, a vehicle’s state calculation can be carried out in a decentralized manner. In backward propagation (Fig. 3(b), right to left), learnable model parameters in the state-transition model are sequentially updated for efficient traffic coordination by increasing the average speed. These two flows (forward and backward propagations) were first expressed using continuous ordinary differential equations (ODEs)*1, the spatially and temporally discretization of which resulted in a special neural network architecture (CoordiNet), as shown in Fig. 3.
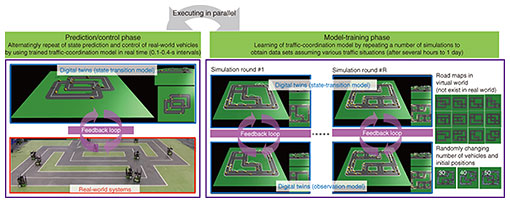
With CoordiNet, a signal-free mobility system can be constructed, which is composed of prediction/control and model-training phases, as shown in Fig. 4. In the model-training phase, a number of traffic simulations on digital twins are executed. In these simulations, data collection assuming various traffic situations is conducted by varying the number of vehicles and their initial positions and traveling not only on actual roads but also on those created in virtual worlds. The model parameters for state transition are sequentially updated to increase the vehicle’s average speed. Through training via a number of traffic simulations, the trained model is expected to be robust to unexpected road situations. Since this model-training phase is computationally heavy, model update is assumed to be executed in non-real-time (after several hours to one day). The prediction/control phase deploys a pre-trained model for real-world traffic coordination. In the constructed system, each feedback loop between digital twins and real vehicles is conducted in real time (in about 0.1–0.4 s).
Some of the results from the above traffic simulations for the model-training phase are shown in Fig. 5. It was found that the average speed increased as the traffic simulation was repeated with CoordiNet. When the speed is normalized to set its maximum value to 1.0, the average speed was increased up to 0.90 after training compared with 0.64 before training using randomly initialized hyper-parameters. This result indicates that data collection via traffic simulations is efficient for learning a traffic-coordination model. I also examined the performance of a conventional neural network (graph attention network (GAT)*2) that does not strictly restrict vehicle states to be collision-free and a traffic simulator (Simulation of Urban MObility (SUMO)*3) for comparison. Using the GAT resulted in collisions from the start of the learning rounds, and the average speed could not be stably increased. When using SUMO, however, no collisions occurred, but vehicles would frequently stop in front of intersections, i.e., the average speed could not be increased.
To execute the prediction/control phase in real time using a trained traffic-coordination model (Fig. 4), a system to control miniature autonomous vehicles was constructed, as shown in Fig. 6. For each miniature autonomous vehicle, a pair of ultrasonic beacons for measuring position, graphics processing unit (GPU) for local computation, Wi-Fi communication module, and pair of motors to rotate wheels were implemented. In this system, each vehicle communicated with neighboring vehicles via a server and Wi-Fi, and vehicle states were predicted on the digital twins to shorten average travel time without collisions. Around 10–20 vehicles were controllable in real time (about 0.1–0.4-s intervals). Using this system, I experimentally confirmed that the vehicles could travel without collisions as the state predicted by the traffic-coordination digital twins.
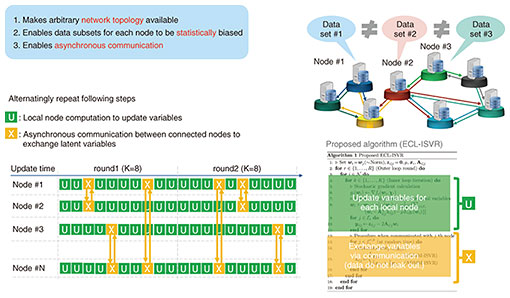
3. Asynchronous decentralized federated learning projectIn the signal-free mobility project, the system is implemented to learn a traffic-coordination model by aggregating data sets obtained via traffic simulators on a single server. However, its collective intelligence learning phase may be shifted to be a distributed manner. The asynchronous decentralized federated learning project aims to train model parameters (e.g., in neural networks) under a massive network graph obeying a large number of nodes and edges. A pioneering study proposed FedAvg [2], which exchanges model parameters and averages them between connected nodes to make a consensus with each other. In contrast, the Edge-Consensus Learning (ECL) algorithm I proposed and its extensions [3, 4, 5] (i) make an arbitrary graph topology available, (ii) are robust to statistical data bias among nodes by imposing constraints on model consensus, and (iii) enable asynchronous decentralized communications, as shown in Fig. 7.
4. Future plansI will investigate the mathematical foundation for learning collective intelligence and increase the number of application examples. My aim is to contribute to the early adoption of Digital Twin Computing into society through optimal control of huge systems. References
|
||||||||||||||||||