|
|||||||||||||
|
|
|||||||||||||
       |
Feature Articles: ICT Infrastructure Technology Underlying System Innovation Vol. 10, No. 11, pp. 50–56, Nov. 2012. https://doi.org/10.53829/ntr201211fa10 Strategy and Efforts for Robotics Integration Aiming at Combining Information and Communications Technology with RobotsAbstractThis article introduces the strategy and research & development for fusing information and communications technology (ICT) with robots in relation to the open source trend. As machine-to-machine (M2M) communication and sensor networks become widespread, we are entering a time when the robots coordinated with clouds can offer new added value.
1. IntroductionWhen people hear the word robot, they tend to think of industrial robots and humanoid robots. The Committee on Robot Policy Study under the Ministry of Economy, Trade and Industry defines a robot as a mechanism composed of three technical components: sensors, an intelligent control system, and a power train. The committee regards a robot as a mechanical system with intelligence*1. However, because the areas where robotic technology is applied have been expanding, the above definition is also being extended. As a systems integrator, not a manufacturer, NTT DATA also takes a broad view of robots, treating them as systems that utilize robotic mechanisms or robotic technology. We aim for robots that work safely and efficiently within a smart space by coordinating resources and services in the cloud or robots that deliver services or perform actions within such an intelligent space, rather than robots that work in a standalone manner.
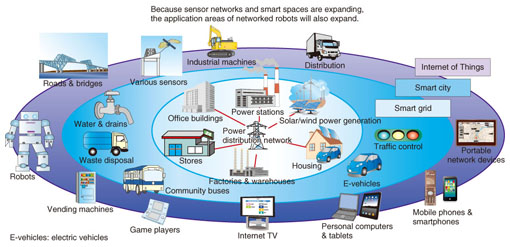
2. Motivation for robot technology researchFaced with the persistent recession in the domestic market, the information and communications technology (ICT) industry expects smart grids and smart cities to develop as a new growth business area (Fig. 1). Because new information infrastructures and solutions, such as machine-to-machine (M2M) communication and sensor networks, are expanding, we can make robots into contributors to society and business by fusing robotics and ICT by organizing an environment in which robots and the new information infrastructures and solutions can work together.
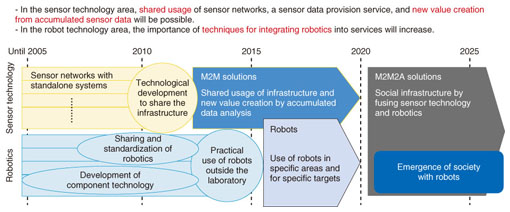
For example, it will soon become possible to have an intelligent mobile robot that understands its surroundings from sensor networks and moves safely and efficiently or a robot that can feed the highly valuable information acquired from big data to the real world. We expect that robot technology that senses the world more efficiently and automatically will become more important for efforts to establish big data in the cloud. Robots for manufacturing made in Japan account for nearly 70% of the world's market; however, competition with Europe and the USA is already harsh, and China and Korea are catching up with the assistance of strong support from their governments. Japan is now in the stage of growing beyond robots for production and is developing the robot application business through the creation and spread of robots for the service industry. NTT DATA will expand the ICT business with wider application by working with a number of robot manufacturers to open up the M2M market utilizing Japan's world-class robot technology. 3. From M2M to M2M2AM2M is a system in which multiple machines connected to a network exchange data without human mediation to automatically provide optimum control. NTT DATA regards a robot as a critical machine that contributes in this system. We predict that the machine-to-machine-to-actuation (M2M2A) solutions, where sensors and robotic technologies are combined to fuse the real and cyber (or virtual) worlds, will become common (Fig. 2). In such solutions, services based on visualized information generated from information gathered by sensors are linked and the formulated actions are performed by machines.
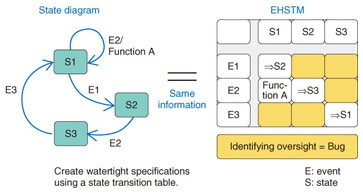
4. Likely areas where ICT and robotics can fuseNTT DATA set up the M2M Cloud Promotion Office in October 2011 in order to accelerate M2M-related business across the company. The office aims to advance ICT services by building an M2M cloud and offering new cloud-based services. Our target areas for applying robotics are life support and social infrastructure maintenance, taking account of the direction of our M2M business expansion. These areas are also our existing business forte. 4.1 Robotics applications in the life support areaNursing care is one area with high potential for robotics application. There is currently strong demand for robots able to provide support for the independence of care receivers or able to assist nursing staff. In fact, the government announced in 2012 that care robots will be covered by long-term care insurance from 2015. This will further accelerate the research and development (R&D) and field trials of such robots. Through the combination of M2M technology with devices used by the elderly or patients at care facilities, data concerning the physical conditions and daily routines of people under nursing care can be collected. This data can then be used to reduce the workloads of caregivers and to provide comprehensive health management in combination with personal health records and lifelogs. Utilizing robotics will make it easier to sense their physical conditions. With such data, it will be possible to create practical appliances such as rehabilitation equipment and programs that are tailored to individuals' conditions and drug management machines that prevent overdoses or failures to take medicine. There is already some R&D of robots for supporting communication between hospital staff members and patients, including their family members, for patients living in remote areas or for hospitals with staff shortages. These robots include an in-hospital guide robot that takes a patient to the appropriate place within a hospital or care home safely and efficiently and an autonomously mobile robot that provides videoconferencing functions. These robots can be improved to offer further convenience to service users and providers by enabling them to provide medical consultation and diagnosis and to recommend healthy habits by utilizing personal health records in the cloud. 4.2 Robotics applications in the social infrastructure areaThe maintenance of social infrastructure, including large buildings and lifeline services, has recently been becoming more important. Infrastructure breakdowns cause massive social and economical loss, so breakdown prevention is vital. A large part of Japan's current infrastructure was built during its high growth period and many structures are approaching renewal time. This renewal must be executed to provide optimum results at a low cost because the government's tax income is declining owing to the aging of society. Construction and maintenance work is ideal for robots because it tends to be tough, dirty, and dangerous and hence unpopular with human workers. Indeed, robots are gradually starting to be used in such workplaces. As one of the M2M cloud solutions for social infrastructure maintenance, NTT DATA offers a bridge monitoring solution called BRIMOS. It monitors a bridge constantly in real time using sensors installed on the bridge. Although it does not use robots, it would be possible to create a solution with higher added value by combining BRIMOS, which already offers sophisticated service, with robotics. Some structures have complicated sensor installation designs or require monitoring over a long distance or wide area. Robotics can help in such cases by offering advanced and autonomous mobility and location identification functions by using a geographical map service in the cloud. Robots can perform structural checks efficiently. As for the visual inspection tasks carried out by human beings, robots can collect images of a structure while autonomously moving in and around it. They can then amalgamate the mass of collected images and thus improve the quality of images in the cloud to help identify any faults. 5. Organizing the development environment5.1 Robot technology middlewareMaking architectures open is rapidly becoming common in the robot industry, and establishing a development environment that utilizes such open architectures and resources is important for creating the contact point between robotics and ICT. As part of the open architecture strategy for promoting the common use of service robots, the National Institute of Advanced Industrial Science and Technology (AIST), which leads R&D in Japan's service robot industry, suggested the standard interface specifications of robot technology components (RTCs) to the Object Management Group (OMG)*2 and they were issued as the OMG's standard in 2008. AIST also developed and published RT middleware*3 to control RTCs compliant with the standard specifications. In collaboration with one of our group companies, CATS Co., Ltd., NTT DATA altered the CATS's computer-aided software engineering (CASE) tool, called ZIPC, for embedded software development to comply with RTCs and RT middleware, which contributed to improvements in the design quality (Fig. 3).
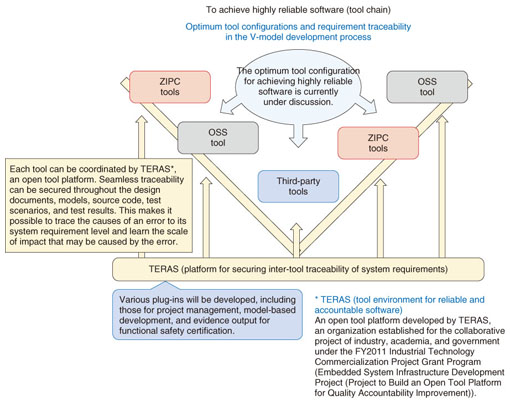
5.2 Safety functionsBecause robots are automatically driven, they must be equipped with advanced functional safety*4 measures to avoid any harm to human beings and the surrounding environment. Robot manufacturers are often the manufacturers of existing home appliances and other equipment. For this reason, they fear damage to their brand image by accidents caused by their robots, so they do not launch their robot products on the market unless they are absolutely confident in the safety of the robots' behavior. As a result, robots remain in the field-trial stage and there are few cases of practical use. This is hampering the business from budding into commercialization, causing a vicious circle in the industry. At the same time, securing high reliability in robots is a strategically important long-term competence as a part of corporate branding. The robot industry is also waiting for the release of ISO13482 in 2013. ISO13482 is the international safety standard for personal care robots (robots designed to communicate with human beings) created on the basis of the functional safety standard for safety-related systems IEC61508*5. If we are to use robots as part of our business, then close collaboration with manufacturers is important. We must also keep an eye on the industry's approach to safety issues that may affect procurement requirements or lawsuits. This is why NTT DATA is discussing with AIST about a comprehensive development environment for delivering highly reliable software for robots to accelerate IEC61508 certification. We are researching configurations and methods that enable seamless tracing of requirements across the series of ZIPC products and other major open source software (OSS) tools within the V-model development process of embedded software. This lets developers provide accountability for risk assessment across their development process from requirement decisions, through design and implementation, to verification and lets them produce highly reliable software more easily (Fig. 4)
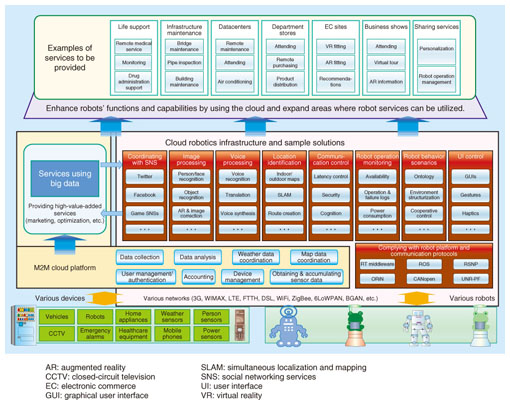
5.3 Coordinating with the cloud in the development environmentRT middleware offers the benefit of cloud coordination through its connectivity with RTCs distributed across networks. If a cloud service application programming interface (API) with the RTC-standard interface can be installed in the cloud, robots equipped with RT middleware can easily use cloud services through this API. In the future, we aim to make an environment where resources in the cloud, application software, and robot software can be easily coordinated by making RTCs in the cloud easily accessible from the development environment or by building a development environment in which the RTC interface can be easily implemented. 6. Future prospects6.1 Remote management of robotsRobot servicing technology and operating technology will be essential to encourage the wide implementation of robots and respond to situations in which robots are commonly used. For example, in the nursing care industry, for which robotics application is promising, care support equipment and tools are often rented and their users are mainly elderly people. Therefore, close monitoring and maintenance are necessary. As the revised Long-Term Care Insurance Act 2012 obliges servicing planning of welfare tools, a maintenance service during a rental period and after sales for nursing care equipment are even more important. NTT DATA aims to create high-value maintenance and operations services that can be included in nursing care equipment service plans. Such services include the provision of a development environment that makes it easy to implement the modules and interfaces to obtain a range of data such as operation logs, error and failure information, and availability or make it easy to obtain such information in the M2M cloud. 6.2 Cloud roboticsThe idea that the cloud could make robots lighter, cheaper, and smarter was articulated by James Kuffner, one of the developers of Google's self-driving car, at Google I/O 2011. NTT DATA is continuing its R&D of the cloud-robotics infrastructure and solutions to provide a service robot system that is highly beneficial to users, as well as M2M cloud coordination. We intend to achieve such infrastructures and solutions by equipping robots with high-speed computation abilities, large storage, advanced functions, and knowledge, which cannot be achieved with conventional standalone robots (Fig. 5).
|
||||||||||||