|
|||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||
       |
Regular Articles Vol. 17, No. 12, pp. 28–34, Dec. 2019. https://doi.org/10.53829/ntr201912ra1 Data-coding Approaches for Organizing Omni-ambient DataAbstractVarious information sensors are currently deployed to generate data such as images, video, audio, and temperature. The amount of such multi-modal data is rapidly increasing compared to the development of information and communication technology (such as storage, transmission, and processing technology). This means a considerable amount of important Internet-of-Things data has to be abandoned since such data cannot be stored, transmitted, or processed. In this article, I describe our approaches for fully using the huge amount of multi-modal data. Keywords: video coding, multi-modal signal handling, IoT data handling
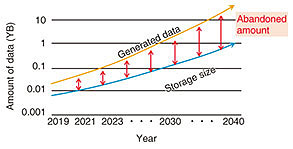
1. IntroductionAn increasing amount of data is becoming available with advances in technology and the expansion of the Internet of Things (IoT). The potential advantages of having such data available are described in this section. 1.1 Growth in IoT dataIt has been reported [1] that the growth in storage devices is expected to increase 10 fold per decade, which is estimated to reach 100 zettabytes (ZB) (1 ZB = 1021 bytes) by 2030 and 1 yottabyte (YB) (1 YB = 1024 bytes) by 2040. However, the growth in information generated by sensors is expected to increase 40 fold per decade, which is estimated to reach 1 YB by 2030 and 40 YB by 2040 (Fig. 1).
Reflecting this rapid growth in IoT data generation and awareness of issues in their processing, a number of international standardization projects, such as Big Media [2], Internet of Media Things [3, 4], Network-Based Media Processing [5, 6], and Network Distributed Media Coding [7], have recently been initiated. 1.2 New opportunities via large-scale multi-modal dataMulti-modal IoT sensors are expected to be deployed around the world to obtain data of the entire earth (Fig. 2), which will make various applications possible. For example, in agriculture:
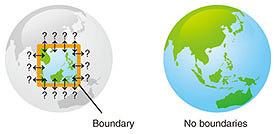
Weather forecasting, disaster prevention, smart cities, surveillance/security, intelligent transport systems, logistics, infrastructure maintenance/inspection, tourism, etc., may benefit from the data of the entire earth. 2. Omni-ambient data: data that cover the entire earthHereafter, the multi-modal data that cover the entire earth are referred to as omni-ambient data. Let us estimate the data size of omni-ambient data. 2.1 Number of sensorsIf we were to observe the entire earth, we would have to deploy multi-modal sensors at every 10-m mesh point at, say, 10 m above the earth’s surface. Since the surface area of the earth is 5.1 × 108 km2, the number of sensors to cover the earth (S) would be 5.1 × 1012. The rationale of covering the entire earth with sensors is as follows. If only a part of the earth is sensed, there will always be boundaries, which may cause uncertainty in data flux/interaction across them. If the entire world is covered, there would not be any boundaries; hence, no uncertainty would arise (Fig. 3).
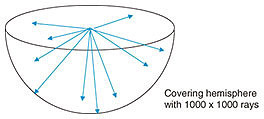
2.2 Visual dataA hemisphere should be covered by about 1000 × 1000 light rays (Fig. 4) to capture the earth’s light field. This resolution is about half the full high definition (HD) resolution (1920 × 1080). With this configuration, one ray covers a solid angle of 6.3 × 10−6 sr (steradian). If we assume that video is captured at 30 frames per second and each pixel has 8-bit red (R), green (G), and blue (B) information, the total amount of raw (uncompressed) video data from a single camera becomes 90 Mbit/s, but these data can be compressed with an existing video coding scheme (such as MPEG-H* or High Efficiency Video Coding (HEVC) [8]) to 1/350 its size, which is V (the total amount of compressed video data from a single camera) = 257 kbit/s. The total visual amount of omni-ambient data is S × V = 1.41 Ebit/s (1 exabyte (EB) = 1018 bytes), which is 41 YB per year. This amount is equivalent to all data that will be generated by 2040 (Fig. 1).
2.3 Audio dataCompact disc quality single-channel audio is assumed for capturing audio, which is 44.1 kHz × 16 bits = 88 kbit/s. Let it be compressed with a conventional audio coding scheme (such as Advanced Audio Coding) to 1/20 its size, which is 4.4 kbit/s. The total audio amount of omni-ambient data is S × A = 45 Pbit/s (1 petabyte (PB) = 1015 bytes), which is 1.4 YB per year. 2.4 Importance of visual dataThe amount of audio data is about 30 times less than that of light data in omni-ambient data. The amounts of other data, such as depth, temperature, and moisture, may be comparable or even less. Therefore, the majority of the data is visual data. This is analogous to the visual data in Internet protocol (IP) traffic. It has been reported that mobile video traffic accounted for 59% of all worldwide mobile data traffic in 2017 and will be 79% by 2022 [9]. IP video traffic accounted for 75% of all worldwide IP traffic in 2017 and will be 82% by 2022 [10].
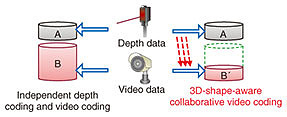
3. Challenges with organizing omni-ambient dataSome of the challenges with and opportunities for organizing omni-ambient data are discussed in this section. In addition to the example techniques described below (3.1–3.4), there should be many techniques to enable such organizing, such as pattern recognition, non-visual signal compression, large-scale archiving, ultrafast database construction, distributed computing, broadband IoT connection, and communication security. 3.1 Further compression via multi-modal synergic codingSuppose there are two random variables X and Y. We then have the following equation I(X; Y) = H(X) + H(Y) – H(X, Y), where I(X; Y) is the mutual information of X and Y, H(X) and H(Y) are the marginal entropies of X and Y, and H(X, Y) is the joint entropy of X and Y. Since I(X; Y) is non-negative, the above equation can be rewritten asH(X, Y) ≧ H(X) + H(Y). This means that in terms of compression, it is always better to compress two (or even more) sources together. This encourages us to abandon conventional single-modal data coding for multi-modal data coding. One of the possibilities of efficient multi-modal data compression is depicted in Fig. 5. Conventionally, depth data and two-dimensional (2D) video data are encoded independently (sizes A and B, respectively, in figure). Since there is a non-negative relationship between depth and the captured image, 3D-shape-aware collaborative video coding may have less compressed data (size B’), which is smaller than B. This applies to not only two but also more than two modalities.
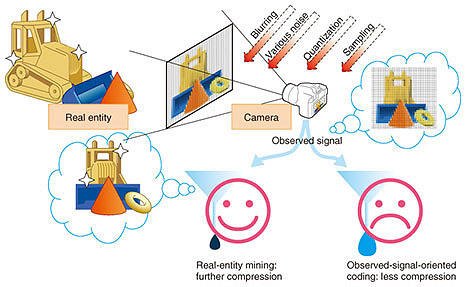
3.2 Removing noise via real-entity miningSensed data are not always collected under ideal conditions, i.e., acquired data are deemed to contain noise, which is unpredictable and uncompressible by nature. Therefore, from the coding, storing, processing, and transmitting points of view, noise should be removed. Conventionally, acquired pixel values are targeted for encoding. However, the original objects should be behind the acquired pixel values. Therefore, being reminded of the existence of original objects (real-entity-oriented approach) may work better in signal processing, data compression, etc., than not taking care of it (observed-signal-oriented approach) (Fig. 6).
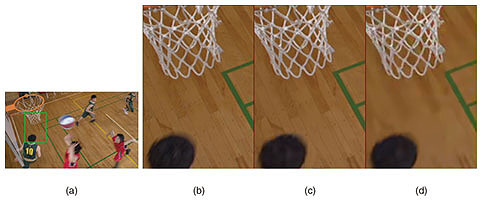
One such example is still-camera video coding. By processing such a video sequence and obtaining a real-entity image of the background, the video can be further compressed. Compared to the state-of-the-art video coding standard H.265/HEVC (reference software HEVC test model (HM)16.4) [8], bit-rate savings of 32.40% on average and 56.92% at maximum in terms of the Bjøntegaard Delta rate (BD rate) [11] were observed. It was also observed that the decoded video contains less camera noise than the original, which means the decoded video is even subjectively better than the original (Fig. 7). It also provides 21.17% faster encoding [12].
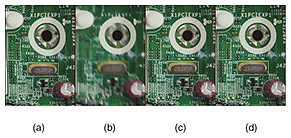
Noise is inevasible in any type of sensed data and it is uncompressible by nature. Therefore, noise reduction from data is crucial for compression efficiency. By tracking noisy rigid objects and temporally aligning them and filtering out camera noise, coding efficiency greatly improves. The filtered image can be considered as the real entity of the rigid object and will be used as a reference frame for input video coding. In our experiments, this processing worked well for both objective and subjective metrics (Fig. 8). There was a 19–47% increase in the BD rate against H.265/HEVC (HM16.6) and 13–30% against preliminary Versatile Video Coding (VVC) [14] (JEM5.0). In terms of subjective video quality, the decoded video looked even better than the original video while only using 141–229 times fewer bits than JEM5.0 [13].
Another example is water-bottom video coding. Video content through the water surface is generally quite difficult to encode efficiently because of random movement and nonlinear deformation of objects seen through the moving water surface. By generating one additional frame from the input video sequence, which represents the real-entity image of bottom objects (Fig. 9), and additionally encoding the frame and storing it as a long-term reference frame, a BD-rate reduction of 12–42% compared to the next-generation standard VVC under development (reference software VVC Test Model (VTM)1.1) [14] and 13–48% compared to VTM4.0, were achieved [15].
3.3 Indexing via machine-to-machine (M2M)-oriented image codingAdding annotations to the obtained signal is essential for organizing omni-ambient data, and of course it should be done using machines (not by humans). Therefore, information coding that maximizes subjective quality may be less important than coding that maximizes machine recognition. One such M2M-oriented image-coding approach is that by Suzuki et al. [16]. The importance of this concept is reflected in the recent initiation of a new standardization project called Video Coding for Machines [17]. 3.4 Reducing amount of original source data via compressed sensingThe above-estimated naïve data amount could become burdensome for initial-stage transmission. Sometimes it may be necessary to reduce the data rate at the sensor and (in return) restore the data by additional data processing. To achieve this, a compressed sensing technique [18] will be applied. 4. ConclusionAn overview was given of the rapidly increasing amount of data generated by ubiquitously deployed multi-modal devices, standardization trends to cope with such data, and possible applications by fully using the data that cover the entire world, i.e., omni-ambient data. The physical amount of such data was evaluated, and it was noted that visual data are dominant; therefore, efficient compression is crucial. Then the possibility of such compression by using mutual information among multi-modal signals was discussed. How real-entity mining would help reduce noise, enable further compression, and improve subjective video quality was also discussed. We will continue investigating and tackling the challenges and taking advantage of the opportunities of this research, expanding the potential for more applications. References
|
||||||||||||||||||||||||||||||||||||||||